Applications of Modern Sensing Techniques to Egyptology
A Report of the 1977 Field Experiments by a Joint Team:
Ali Helmi Moussa
Chairman, Department of Physics
Ain Shams University
Cairo, A.R.E.
Lambert T. Dolphin
Senior Physicist
SRI International
Menlo Park, California 94025
Gamal Mokhtar
President, Organization of Antiquities
Cairo, A.R.E.
Prepared for:
National Science Foundation
Office of International Programs
Washington, D.C. 20550
Published by:
SRI International
Radio Physics Laboratory
Menlo Park, California 94025
NSF Grant No. INT76-00414
MEMBERS OF THE JOINT RESEARCH TEAM
Ain Shams University
Cairo, A.R.E.
Sayed Abdel-Wahab
Tawfik El Dessouki
Ali Eatah
Al Helmi Moussa
Fahmi Oaf
Ashraf Shams Yahia
SRI International
Menlo Park, CA 94025
Lambert Dolphin
Roger Vickers
James Hodges
Eugene Spurlock
John Tanzi
Robert Bollen
S.O. Buckingham
Supporting Colleagues from the
Organization of Aniquities
Cairo, A.R.E.
Gamal Mokhtar
Ahmed Kadry
Ali Hassan
Nassef Hassan
Ali El Khouli
Elsayed Aly Higazy
Frontispiece
ABSTRACT
To date, modern scientific instrumentation has been only sparsely employed
in the service of archaeology in Egypt. To remedy this situation a joint
team from SRI International, Ain Shams University, and the Government of
Egypt Organization of Antiquities has been working together since 1974
to apply both newly developed and traditional geophysical techniques in
Egypt.
During the 1977 field work at Giza, Saqqara, and Luxor, the team employed
acoustic sounding, resistivity, and magnetometry for a variety of exploration
tasks. Aerial photography and thermal-infrared imagery was also contracted
from the Egyptian National Academy of Scientific Research and Technology
Remote Sensing Center to aid in the interpretation of results.
The methods employed brought significant results at all three sites.
A number of anomalies discovered by use of the instruments merit archaeological
investigation and ground-truth confirmation. Project findings are discussed
in detail in this report.
CONTENTS
MEMBERS OF THE JOINT RESEARCH TEAM
ABSTRACT
LIST OF ILLUSTRATIONS
LIST OF TABLES
ACKNOWLEDGMENTS
I. INTRODUCTION
II. SCOPE OF RESEARCH
III. FIELD SITE SURVEYS
A. Alexandria
B. Tanis
C. Giza
D. Saqqara
E. Luxor
IV. FIELD MEASUREMENTS IN EGYPT
A. Aerial Imagery of the Test Areas
B. Magnetometry
C. Resistivity Measurements
1. Background
2. Interpretation
of the Data
3. Measurements
at Giza
4. Measurements
at the Sphinx
5. Suggested
Work at Giza
6. Measurements
at Saqqara
7. Summary
D. Acoustic Sounder Measurements
1. Background
2. Equipment
Characteristics
3. Measurements
in the Valley of the Kings
4. Measurements
at Giza
5. Measurements
in Cheops' Pyramid
6. Measurements
at Saqqara
V. CONCLUSIONS AND RECOMMENDATIONS
APPENDICES
A. MEASUREMENTS IN EL DORADO LIMESTONE
MINE
B. EXAMPLES OF ACOUSTIC ECHO TYPES
REFERENCES
ILLUSTRATIONS
Frontispiece - Funerary Boat of Cheops at Giza--The Oldest Known Boat
in the World
1. Map of Major Archaeological Sites in Egypt
2. Map of Ptolemaic Alexandria
3. Roman Amphitheatre in Alexandria
4. View of Nabi Daniel Street, Alexandria
5. View of Saqqara Showing Sand-Filled Tomb Shafts and Zoser's Pyramid
6. Typical Cross Section at Saqqara
7. Interior of Falcon Galleries at Saqqara
8. Intrusion of a Falcon Gallery into a III Dynasty Tomb
9. Recent Sand-Fill in Entrance of Ibis Galleries
10. Photograph of Emery Excavations at North Saqqara
11. Map of the Valley of the Queens
12. Map of the Valley of the Kings
13. Thermal-IR Image of Chephren's Pyramid
14. Thermal-IR Image of Giza Pyramids
15. Magnetic Anomaly Expected from Egyptian Mud-Brick Wall
16. Magnetometry Readings on North and West Sides of Sphinx
17. Typical Magnetic Anomalies of Common Archaeological Features
18. Magnetometer Traverse Across Baboon Galleries
19. West Side of Chephren's Pyramid Looking South
20. Magnetometer Readings on West Side of Chephren's Pyramid
21. Magnetometer Readings on South Side of Chephren's Pyramid
22. Anomalous Area on South Side, East Corner of Chephren's Pyramid
23. Rock Drill, Showing Depth of Foundation Blocks at Southeastern
Corner of Chephren's Pyramid
24. Magnetometer Readings Across a Covered Chephren's Boat Pit
25. Schematic Diagram of a Simple Resistivity Instrument
26. Common Electrode Configurations for Resistivity Arrays
27. Current Flow Contours in a Uniform Conducting Medium
28. Resistivity Readings over the Lower Entrance to Chephren's Pyramid
29. Location of Resistivity Traverses on North Side of Chephren's Pyramid
30. Photograph of Resistivity Electrodes Across Entrance to Chephren's
Pyramid
31. Photographs Showing Disc Electrodes for Resistivity Survey over
Rock Surface
32. Resistivity Readings With and Without Smoothing
33. Interior of One of Chephren's Covered Boat Pits
34. Roof Slabs over Chephren's Boat Pit
35. Resistivity Profiles over a Known Boat Pit
36. Locations of All Resistivity Traverses Around Chephren's Pyramid,
Showing Compressed Data
37. Northwest Corner of Chephren's Pyramid
38. Resistivity Profile 16 on West Side of Chephren's Pyramid near
Northwest Corner
39. Resistivity Profile 12 on West Side of Chephren's Pyramid near
Northwest Corner
40. Resistivity Profile 20 on West Side of Chephren's Pyramid near
Excavated Tomb
41. Resistivity Profile 45.1 at Center of East Face of Chephren's Pyramid
42. Resistivity Profile 56 over Patched Area, North Pavement, Chephren's
Pyramid
43. Detailed Geometry of Interior of Chephren's Pyramid
44. Resistivity Profiles and Associated Geometry of Chephren's Pyramid
Horizontal Passageway
45. Photograph of Chephren's Passageway Showing Resistivity Traverses
59 and 60
46. Resistivity Traverse over Black Granite Paving Stones of Cheops'
Mortuary Temple
47. Location of Resistivity Traverses Around the Sphinx
48. Resistivity Profile 202 on South Side of the Sphinx
49. Photograph of Electrodes in Place for Traverse 202 Along South
Side of the Sphinx
50. Photograph Showing Resistivity Work in Front of the Sphinx
51. Resistivity Profile 200 in Front of the Sphinx
52. Map of North Saqqara Showing Areas of Project Activity
53. Map of a Portion of the Falcon Galleries
54. Photograph Showing Electrodes in Place for Traverse 103 Across
Roof of Falcon Galleries
55. Locations of Resistivity and Acoustic Traverses Across Falcon Galleries
56. Resistivity Profile 107 Across Falcon Galleries
57. Resistivity Traverse 111 Across Valley of Old Lake Abusir
58. Map of Resistivity Traverses Across Old Lake Abusir Valley and
Area of Lost Lepsius Animal Galleries
59. Relative Locations of Resistivity Traverses over Lepsius Animal
Galleries
60. Location of Resistivity Highs over Ancient Animal Gallery Area
61. Resistivity Contours over Northwest Saqqara Area
62. Photograph Showing High-Anomaly Area Discovered by Traverses 127,
128, 129, and 130
63. Photographs Along Resistivity Traverse 114
64. Resistivity and Cross Section of Terrain Along Long Traverses at
Saqqara
65. Resistivity Profile 123 Believed to Cross Areas of Lepsius Lost
Galleries
66. Bristow Array Configuration
67. Scattering Cross Section of a Sphere for Various Ratios of Radius
to Wavelength
68. Effects of Long and Short Wavelengths Incident on a Target
69. Scattering from Two Closely Spread Targets
70. Acoustic Noise Generated by a Trotting Camel
71. Block Diagram of Acoustic Sounder
72. Acoustic Sounder Transducers Being Mounted Horizontally in Belzoni's
Chamber
73. Close-Up of Transducers Showing Loading Devices
74. Acoustic Transducers, Showing Covers to Protect Rock Walls
75. Entrances to Tombs of Ramses VI and Tutankhamun in the Valley of
the Kings
76. Close-Up of Entrance to Ramses VI Tomb
77. Plan of the Tomb of Ramses VI
78. Acoustic Sounder Mounted on Floor of Ramses VI Tomb to "Discover"
Tomb of Tutankhamun
79. Cross-Sectional Geometry of Ramses VI and Tutankhamun Tombs
80. Acoustic Echo from Tutankhamun's Tomb Detected from Ramses VI Tomb
81. Acoustic Echo Looking from the Roof of Tutankhamun Tomb Annex Roof
to the Ramp of Ramses VI Tomb Above
82. Plan View of Ramses VI and Tutankhamun Tombs
83. Vertical Cross Section of Ramses VI Tomb and Tutankhamun Annex
84. Sounder in Place on Roof of Annex Chamber of Tutankhamun's Tomb
85. Echoes Received Through the South End of the Roof of Tutankhamun's
Annex Chamber
86. Echoes from Unexplained Anomalies Seen from Annex Chamber of Tutankhamun's
Tomb Looking West
87. Echoes from Unexplained Anomalies Seen from Annex Chamber of Tutankhamun's
Tomb Looking South
88. Mortar-Filled Fault in Ramses VI Tomb Wall
89. General Map of the Theban Necropolis
90. Acoustic Sounder Equipment in Belzoni's Chamber
91. Scope Photo Showing One-Way Pulse Propagation in Bedrock Beneath
Chephren's Pyramid
92. Positions of Acoustic Sounder in Belzoni's Chamber
93. Histogram of Acoustic Echoes Looking Vertically Downward from Belzoni's
Chamber
94. Sketch Illustrating Range Depth of Observed Echoes Beneath Belzoni's
Chamber
95. Cross Section of Chephren's Pyramid
96. Acoustic Echoes Looking North from Belzoni's Chamber
97. Acoustic Echoes Looking South from Belzoni's Chamber
98. Acoustic Sounder Positions on West Side, Northwest Corner, of Chephren's
Pyramid
99. Acoustic Echoes at Positions 38 Meters South of Northwest Corner
of Chephren's Pyramid
100. Echoes 105 Meters from Northwest Corner of Chephren's Pyramid
101. Acoustic Sounder Positions near Known Tomb West of Chephren's
Pyramid
102. Plot of Echo Positions Taken from Figure 100
103. Acoustic Sounder Positions in Anomalous Area, South Side, Southeast
Corner of Chephren's Pyramid
104. Plot of Acoustic Echoes Through Foundation Blocks on South Side,
Southeast Corner of Chephren's Pyramid
105. Acoustic Sounder Positions in the King's Chamber of Cheops' Pyramid
106. Acoustic Echoes Looking Through the Floor of the King's Chamber
in Cheops' Pyramid
107. Scattering and Reverberation of Acoustic Waves in Pyramid Blocks
108. Acoustic Echoes Through Floor of Entrance Passage to King's Chamber
109. Sketch Showing Location of Possible New Chamber in Cheops' Pyramid
110. Acoustic Sounder Positions at Saqqara for Sounding Through Sand
and Rubble
111. Shallow Acoustic Echoes Through Saqqara Overburden
112. Joint Team Members from Ain Shams University and SRI International
A-1. Acoustic Sounder Test Set-up in El Dorado, California Limestone
Mine
A-2. Plan View of Limestone Mine Showing Sounder Locations
A-3. Oscilloscope Photograph for Sound Velocity Determination
A-4. Acoustic Propagation Paths in Limestone Mine
A-5. Acoustic Signals Received in Limestone Mine
A-6. Acoustic Attenuation in El Dorado Limestone
A-7. Test Pit for Acoustic Sounder Tests in Sand
A-8. Acoustic Signals in Sand Near Edge of Test Pit--No Echo
A-9. Acoustic Echo from Adobe Step Buried in Sand
B-1. Acoustic Scattering Geometry for Various Types of Targets
B-2. Acoustic Signals Expected from Various Targets
B-3. Fresnel Zone Effects in Acoustic Scattering
TABLES
1. Detected Anomalies and Recommended Follow-up Work
2. Recommended Further Sensing Surveys
ACKNOWLEDGMENTS
This research was sponsored by Grant No. INT76-00414 from the National
Science Foundation. We are particularly grateful to Mr. Selim Selcuk of
the NSF Office of International Programs for his diligent and persistent
efforts both in Egypt and in the United States in making this work possible.
I. INTRODUCTION
This joint Egyptian-American research project is a continuation of work
conducted in Egypt during the fall of 1974. Our goal at that time was to
apply ground-penetrating radar techniques to an exploration of the pyramids
of Giza and the surrounding necropolis. Several research groups in the
United States have developed such radars in recent years and, on the basis
of samples of limestone from Giza obtained in 1973, we hoped that radar
probing of the pyramids in search of unknown passages or chambers would
be feasible. However, it was found that the Giza area rock (and most of
the limestone rock found in other archaeological sites in Egypt as well)
exhibits very high in situ radio frequency losses so that radar probing
is limited, for all practical purposes, to depths of a few meters even
when choice of operating frequency is optimal.1*
These unexpectedly high radar losses are due to high porosity and poor
quality of the rock (the limestone could also be classed as fine grained
sandstone), and the high ambient humidity (75% to 85%) of the Nile Valley,
the latter being due to prevailing winds blowing south from the Mediterranean
Sea; and to capillary action from the Nile plain. When dielectric properties
of Egyptian limestone were remeasured in the laboratory under controlled
humidity conditions, radio frequency losses were much greater than were
measured for the 1973 samples that had dried out in California where typical
average humidity is about 55%. In spite of the high radio frequency losses
found at Giza, the radar's capabilities were proven in the third pyramid
(Mycerinus), and have also been demonstrated in other places2-4
where conditions are more favorable.
While radar proved virtually useless for exploring sites in Egypt (with
the one exception of areas covered by wind-blown Sahara sand, which has
very low RF attenuation properties), the joint team realized that other
remote-sensing instrumentation could be very valuable and had rarely been
used in Egypt in the past. Egypt is only about 25% to 60% explored archaeologically,
and modern scientific technology has much to offer as an adjunct to the
classical methods of archaeology.5
The work described in this report is a continuation of our 1974 project
using new instrumentation. It was realized that acoustic sounding complements
radar (electromagnetic sounding) because sound waves travel well in damp,
porous rock under conditions where electromagnetic waves generally do not.
Seismic waves, for example, from small explosive charges, are routinely
used for oil and mineral exploration on a large scale by the geophysical
industry. Since large geologic features such as salt domes, ore bodies,
or fault zones are sought by this method, the scale of observation is of
the order of many kilometers, and the resolving power need be only a few
hundred meters. The frequency regime of this type of seismic sounding is
in practice limited to frequencies below 500 Hz. At higher frequencies,
the Holosonics Corporation has successfully used sonic energy for probing
ahead of the working face of mining and transportation tunnels.6
However, no suitable sonics instrumentation was known to our group for
use in archaeology. The SRI team therefore developed and tested a system,
described later in this report, for use in Egypt.
The team also recognized that no one sensor system could serve every
purpose and that the simultaneous use of two or more sensors would multiply
the effectiveness of archaeological survey work. The recently completed
field work also made use of (1) resistivity methods, (2) proton magnetometry,
and (3) aerial photography and thermal infrared imagery. Results of our
field work using this instrumentation are discussed in the following sections.
II. SCOPE OF RESEARCH
Early in the project, guidelines for our work were outlined for us by
Dr. Gamal Mokhtar, President of the Organization of Antiquities. He affirmed
the validity of applying advanced remote sensing techniques to the service
of archaeology in Egypt, subject to the following conditions:
(1) Only tested and proven survey methods are to be employed. The archaeological
sites of Egypt are not to be used to field test new methods not proven
successful elsewhere, nor to encourage incompetent or professionally unsound
field work.
(2) Modern scientific methods are to be used only to make more effective
and efficient the time-honored methods of archaeology--not in any way to
supplant these methods.
(3) No damage must be done to any of the monuments. Measurements that
disturb the area are not permitted, and any subsequent verification of
suspect areas is to be done by qualified Egyptologists.
Great care was taken by the team to follow these guidelines during our
work. For example, the acoustic sounder, new to archaeology, was thoroughly
field-tested in California before shipment to Egypt to assure that this
equipment met Condition I (see Appendix A). To meet Condition 3, special
water-soluble contact cements were used with both the acoustic sounder
and resistivity gear to avoid staining rock walls or paving stones, or
otherwise leaving any indication that measurements had been taken. One
limited excavation was conducted for us by Egyptologist Dr. Ali Hassan
in accordance with Condition 3.
Dr. Gamal Mokhtar also suggested several major problems remaining in
Egyptology that the team should consider as major challenges for any instrumentation
or survey work that could be imagined for the foreseeable future. In addition,
the project was granted permission to work at a number of sites in cooperation
with local inspectors from the Organization of Antiquities, to explore
what the present equipment could reasonably accomplish.
Dr. Mokhtar's four areas of interest are:
(1) The tombs of Alexander the Great and subsequent Ptolemaic rulers
and their wives, believed by many experts to lie somewhere beneath the
modern city of Alexandria.
(2) The ancient city of Tanis (now San el Hagar) in the Delta region,
a potentially rich site for the XIX and XXII dynasties.
(3) Missing royal tombs in the Valley of the Kings, West Valley, and
Valley of the Queens. This area is especially difficult to excavate because
large amounts of natural debris and man-made rubble must be moved for every
search.
(4) The tomb of Imhotep, believed by some to be in an area of the Saqqara
necropolis systematically excavated in recent years by the late Walter
B. Emery of the Egypt Exploration Society.
The Giza plateau was acknowledged to be an area convenient to Cairo
for field work by the project, although this area has been more thoroughly
studied by archaeologists than many other sites in Egypt.
The project goal has been not only to apply modern remote sensing to
the service of archaeology in Egypt, but also to transfer technology, equipment,
and expertise to our scientific colleagues in Egypt. Another important
factor is that in the past Egyptology has been largely in the hands of
non-Egyptians, and only in recent years have well-trained Egyptians assumed
responsibility for archaeological exploration of their national historic
treasures. Our project therefore seeks also to promote the international
stature of Egyptian archaeologists by equipping them with the latest methods
in use or potentially available elsewhere in the world.
Figure 1 is a map of some of the major archaeological sites in Egypt.
Figure 1
III. FIELD SITE SURVEYS
During October of 1976, team members from Stanford Research Institute
and Ain Shams University visited Alexandria, Tanis, Saqqara, Giza, and
Luxor, to meet with local Inspectors of the Organization of Antiquities
to plan field work for the following January and February. This section
presents a very brief description of these sites summarized from available
references and from our on-site reports.
A. Alexandria
After conquering Egypt, Alexander the Great left Memphis in the winter
of 332-331 B.C. and set out to consult the oracle of Jupiter-Amon at the
Siwa Oasis. On the way, while stopping at a modest fishing village he decided
to found a city there to be called Alexandria. Plans were drawn up by Deinocrates
of Rhodes, and executed by Cleomens of Nancratis; meanwhile Alexander continued
eastward where he died of a fever in 323 B.C. His body was brought back
to Egypt with elaborate ceremony, wrapped in gold and finally interred
at Alexandria.7 The original sarcophagus of gold is supposed
to have been replaced with a sarcophagus made of glass by one of Alexander's
successors who evidently needed the gold for his treasury. Many writers
believe the burial site of Alexander and several of the Ptolemies was at
the great crossroads in the heart of the city called the Sema, or Soma
(Figure 2),8 but its actual location today is unknown, as is
the site of the ancient great library.
The city of Alexandria was subsequently destroyed and rebuilt on a number
of occasions. The modern city lies on a hill that rises gradually from
the harbor. This hill contains layers of ruins dating from the Greek and
Roman eras to the present time. The site of the Sema may well be near Fort
Kom el Dikah in the heart of the city. Some think the tomb of Alexander
may lie under a small mosque on Nabi Daniel Street just adjacent to the
fort. The fort, long used for military purposes, was never extensively
encroached upon by tall city buildings. Ruins of a Roman amphitheatre (Figure
3), and Roman baths and villas have been uncovered and restored there.
The various layers of rubble marking each era of Alexandria's history may
be seen at several places at Kom el Dikah, excavated by a Polish group.
The amphitheatre and baths lie about 10 m below the surrounding modern
city level.
Figure 2
Another candidate site for the location of the tomb of Alexander the
Great (and also his successors, the Ptolemies and their wives) is a large
cemetery somewhat to the east of the city center. In recent years the location
of the present-day Alexandria University Faculty of Medicine buildings
has also been studied as a possible site.
Under the 1-to-10-m-thick rubble and fill of the modern city, porous
sandstone bedrock is to be found. Catacombs are carved in the coarse sandstone
bedrock on a low hill in the southwestern part of the city. This sandstone
is highly permeable--a canal built by Mohammed Ali in the early part of
the nineteenth century resulted in the permanent flooding of the third
level of these Roman catacombs of Kom esh Shugafah, which date to approximately
200 A.D.
Large areas of Alexandria are important archaeologically. The Greco
Museum in the city is filled with statues, pottery, and stone fragments
typical of those found wherever digging is permitted in the locality. Discovery
of the original location of the great ancient library of Alexandria would
be a great find. Undermining the city with exploratory tunnels would, of
course, be prohibitively expensive and technically difficult. The alternative
is to explore accessible sites such as Fort Kom el Dikah (the Polish work
is continuing), and areas of the city being rebuilt. Fortunately, a recent
law requires an archaeological survey of any lot after removal of an old
building, and prior to new construction.
Figure 3 &
4
Figure 4 is a photograph of Nabi Daniel Street near Fort Kom el Dikah.
In addition to the archaeologically interesting layers beneath the modern
pavement, there are sidewalks, building foundations, cellars, sewers, pipelines,
and other public utilities both old and new to be found. When one asks
what remote sensors one might apply to the City of Alexandria to help the
archaeologist, modern science has very little to offer. Aerial photography
including infrared imagery would at most confirm what one already knows--that
Alexandria is built on a low hill surrounding an ancient harbor. Ground-based
sensors--radar, resistivity, induced polarization, and acoustic sounder--would
at best only observe the surface layers interlaced with their public utilities.
The best recommendation one can offer is to encourage excavation and perhaps
selected horizontal or vertical core drilling of accessible areas. One
could, for example, drill small borescope exploration holes under adjacent
areas from the Fort Kom el Dikah excavations. An important archaeological
task in the Alexandria area is the exploration and excavation of the harbor
where ancient pillars and statues have been found. Side-looking sonar and
sub-bottom profiling instruments could greatly assist the harbor exploration.
At least one important statue from ancient times has been found nearly
intact on the harbor bottom, and ruins have been seen on the harbor floor
by divers.
B. Tanis
The city of San el Hagar, site of ancient Tanis, was visited and photographed
in December 1976 by members of the team from Ain Shams University. The
archaeologically interesting area extends along the road for about 3.5
km in a north-south direction, and 1.5 km east and west. The highest point
of the archaeological mound is 33 m above sea level. Tanis is typical of
cities in the Nile Delta region. Cultivated fields and canals criss-cross
the area and a present-day village lies on top of some of the ruins. Excavation
of a small area of Tanis has gone on since 1825, and a French group is
currently at work there. However, only a beginning has been made.9-11
Wet mud covering the ruins hastens the deterioration of tombs, inscriptions,
and even the stones themselves. Good aerial photographs of Tanis would
be useful; however, these were not contracted for by our project because
of fund limitations, nor was any ground work conducted there, although
a resistivity survey could have some limited usefulness in locating buried
features. A good resistivity survey of Tanis would be sufficiently time-consuming
to warrant a separate project especially devoted to the archaeologically
interesting area, but the usefulness of this method at Tanis is limited
by the very wet, highly conductive mud. The electrical conductivity of
this mud is too great to permit a radar survey, and the use of the present
acoustic sounder system is too slow to be justifiable. However, Tanis remains
interesting for reasons given by one recent commentator:
"Tanis has... provided a major archaeological puzzle... the site has
produced a very considerable amount of stone monuments of earlier periods
including at least 18 obelisks of Ramses II and a fragment from a colossus
of his probably reaching 28 meters in height, and many sphinxes and statues
of the Middle Kingdom. On the evidence available it would seem that the
kings of Dynasties 21 and 22, unwilling or unable to commission sufficient
new stone monuments to embellish their temples, collected a large number
from elsewhere and transported them to Tanis, which must have become a
veritable museum of Egyptian sculpture... Considerable mounts await
excavation outside the temple enclosure, on some of which columns and blocks
have been observed."12
C. Giza
The Giza plateau, where the most famous three pyramids are found, is
only 14 km from the heart of Cairo and the Nile River. In recent years
the city has grown up all the way along Shari Al Ahram Giza to the village
of Nazlet Es Sammam at the base of the plateau. The pyramids of Giza and
surrounding mastabas are built on limestone bedrock in which numerous tombs
have also been cut. Excavations in the area over the past 150 years have
been extensive, although no one believes the area to be fully explored.
The joint teams of Professor Luis Alvarez of the University of California
at Berkeley and Professor F. El Bedewi of Ain Shams University conducted
cosmic ray experiments inside Chephren's pyramid, concluding in 1974, and
showed that it was unlikely that any major chambers exist above the bedrock
in the main body of the pyramid.13 However, no one knows whether
additional chambers exist within the first pyramid (that of Cheops), whether
there are boat pits around the third pyramid (Mycerinus), or whether there
are interesting chambers under the pyramids or their surrounding pavement,
or around the Sphinx. The fact that radar cannot answer these questions
was discouraging to us after our 1974 work; however, the present results
using acoustic methods and resistivity methods reopen many possibilities
for further, efficient surveying of Giza, as will be evident from the sections
following.
D. Saqqara
Easily accessible by car from Cairo, the necropolis of Saqqara lies
on the plateau west of ancient Memphis near the present-day villages of
Mit-Rahena and Abusir. The archaeologically important area extends for
50 km along the edge of the Nile Valley, from the cliffs of Abu Roash and
Giza to the north, to Lisht in the south, and is more than one kilometer
wide.14 So archaeologically rich is this area, and so incompletely
explored by any systematic methods, that it is frequently said that one
will find something interesting everywhere one turns a stone or disturbs
the sand at Saqqara.
Especially interesting to our present project was North Saqqara, where
mud brick tombs and mastabas of the I dynasty are found along the eastern
cliff edge of the plateau. Shaft-tombs and mastabas of the II and III dynasties
lie to the west. Figure 5 is a photograph of a portion of the II dynasty
zone--virtually every sand-filled depression in the photograph is the top
of a filled shaft. In the background is the pyramid of Zoser, the first
of the true pyramids evolved from the mastabas that were used exclusively
for important burials until the time of Zoser (ca. 2780 B.C.), whose architect
Imhotep built this step pyramid. (Every true pyramid since the time of
Zoser was constructed using the step-pyramid configuration inside.)15
Imhotep became a god of healing, important especially in the Greco-Roman
period. According to one hypothesis, his tomb may well be located along
with other important III dynasty tombs, in northwestern Saqqara. The area
of these III dynasty tombs is especially interesting. Shaft burials, sometimes
with associated mastabas (several of which are aligned with the sides of
the step pyramid) are found here. Beneath these tombs a labyrinth of underground
catacombs was sunk in Greco-Roman times (Figure 6). They contain many thousands
of clay pots, each one containing mummified ibises, and falcons. Also the
labyrinths contain sacred baboons, and cows who were the mothers of the
sacred bulls buried elsewhere at Saqqara.16 Figure 7 shows a
small portion of one of the falcon galleries. Some of the galleries intercept
III dynasty shafts lying above them (Figure 8) but, to date, no tomb attributable
to Imhotep has been found. Not all of the sacred animal galleries are known
in modern times; Richard Lepsius17 (in 1843) described galleries
to the west that we believe were relocated this year by our instruments.
They have not been opened and explored in modern times.
Saqqara is troubled by wind-blown sand that fills every opening annually.
Figure 9 is a photograph of the entrance to a major ibis gallery painstakingly
excavated by the late W. B. Emery only a few years ago. Even the galleries
cleared by Emery have been only partially opened and surveyed.18
Figure 10 is a photograph of a portion of the Temple of Isis excavated
by Emery overlooking the ancient Abusir crocodile-lake bed.
Figure 5 &
6
E. Luxor
It is generally agreed that the Valley of the Queens (Figure 11) must
contain a number of unknown tombs, since the lineage of Queens from the
XIX dynasty onward is not complete. The Valley appeared unsuited for initial
surveys, however, because the known tombs are too widely separated to provide
a suitable pair of locations for transmitter-receiver transducers in an
acoustic measurement. None of the other techniques contemplated for use
in Egypt appeared workable at any of the three valleys on the West Bank.
In the East Valley of the Kings (Figure 12) there are also quite likely
to be several major undiscovered tombs. One pair of sites found to be ideal
for initial acoustic experiments was the floor of the Ramses VI tunnel
and the ceiling of the storeroom adjoining the antechamber of Tutankhamun,
which lies approximately below the Ramses VI tunnel. Only estimates of
the path length between these two sites were possible during our initial
visit. Later measurements showed the distance to be about 8 m. The team
agreed that an initial one-way transmission test followed by a monostatic
reflection-seeking experiment in the Ramses VI entrance ramp would show
whether good acoustic propagation in local bedrock was achievable, and
would clear the way for a later complete survey. No other tomb pairs inspected
were as suitable as these, although sites for more ambitious measurements
were certainly apparent to us--for example, the tomb of Seti I and neighboring
tombs.
Figure 7 &
8
In the West Valley of the Kings, a short distance north of the more
famous East Valley of the Kings, there are only two known tombs. The tomb
of Ay is at the far end of the West Valley and is backfilled with rubble.
The tomb of Amenophis III (also backfilled) is halfway into the West Valley.
It is strongly suspected that the West Valley must contain more than these
two tombs, yet none has been found nor has the West Valley been extensively
searched. In particular, the tomb of Ramses VIII could well be there. The
most exciting feature of the West Valley is that it has apparently suffered
little disturbance. The natural rockfall all seems to be in place, and
by inference, the debris from tomb cutting is also probably in its original
place. A workable plan for exploring this valley would be very different
from the computerized study we envisaged for the Valleys of the Kings and
Queens, and would have to involve a preliminary process to narrow down
the total area. Several possibilities come to mind, including:
(1) Geologic inspection to determine areas of unnatural debris accumulation.
(2) Sampling debris accumulation for pieces showing signs of tool marks
and graffiti.
(3) Examining the samples of (2) for trace bronze content from tools.
Either x-ray fluorescence or atomic absorption spectroscopy or neutron
activation would give adequate sensitivity.
Figure 9 &
10 & 11
& 12
The refined areas could then be surveyed acoustically using a horizontal
borehole technique at suitable spacings.
In summary, our early field site survey in the Theban necropolis led
us to the following conclusions:
(1) The only technique considered suitable for the West Bank was acoustic
probing, since the rock was too lossy for radar and the geometry was wrong
for magnetics and resistivity.
(2) A feasibility experiment first of all should be conducted in the
Ramses VI and Tutankhamun tombs to verify propagation characteristics and
to detect the presence of each tomb with equipment in the other.
(3) Based on these results we should conduct limited surveys at greater
ranges and propose a long-term plan for surveying both the East and West
Valleys. Such a project could make use of a three-dimensional computer
program to keep track of the geometry of known tombs, the geology of the
area, and the inputs from our acoustic probing work.
IV. FIELD MEASUREMENTS IN EGYPT
Prior to our field work, arrangements were made with Dr. E. M. El Shazly
of the Remote Sensing Center of the Egyptian National Academy of Scientific
Research and Technology, for aerial photography of Giza, Saqqara, and Luxor,
the results of which are discussed in Section IV-A, below.
Drs. Ali Eatah and Hatem El Hennawi of Ain Shams University were able
to visit SRI in Menlo Park for six weeks prior to the field work under
sponsorship of this grant, an important factor in our team's ability to
work together successfully in the field.
In mid-January 1977, the team assembled in Egypt for the new field work
at three sites: Giza, Saqqara, and Luxor. Since time in Egypt was limited
to approximately six weeks, the team was usually divided into at least
two groups, one for resistivity and one for acoustic sounding. The magnetometer
work, requiring very little manpower, was a third parallel effort. Results
in this section are described under the headings of the instrumentation
employed rather than by geographical area.
A. Aerial Imagery of the Test Areas
In most of the areas selected for surveying by our equipment there was
a lack of large-scale current aerial photography for base-mapping purposes.
We therefore elected to obtain fresh photography of the Giza Plateau, Saqqara
necropolis, and the area of the West Bank of Thebes immediately surrounding
the East and West Valley of the Kings and the Valley of the Queens, through
the generous cooperation of Dr. Abd El Hady and Dr. E. M. El Shazly of
the Remote Sensing Center of the Egyptian Academy of Scientific Research
and Technology. The scale chosen for the photography was 1:6000, or one
inch to 500 ft. A resolution on the film of 50 lines per millimeter should
result in a ground resolution element of about 5 inches (13 cm) and a total
coverage of 4500 ft (1372 m) on a side for the resulting 9-by-9-inch prints.
Concurrently with the photography, scanning imagery was requested using
the Bendix M2S scanner of the Remote Sensing Center. Thermal
infrared imagery, taken both during the day and pre-dawn, was also requested
in the hope that shallow tombs or passages would influence the local thermal
inertia sufficiently to present a surface temperature contrast.
At the time of this writing, only the multispectral scanner imagery
and black and white photography are complete; the thermal imagery is being
processed. A discussion of these photographs and images will be presented
in a separate report to be issued as a supplement to this volume. The specifications
for the infrared imagery are:
Spectral bandwidth 8-14 mm
Spatial resolution 2.5 ´ 10-3
radians
Altitude 1000 ft where permitted by terrain
Field of view 100°
Sensitivity ~ 0.1°C
With such specifications, a linear surface-temperature anomaly more
than 2.5 ft wide could be detected under ideal circumstances. A single-point
anomaly would have to be somewhat larger in order to differentiate between
the target and possible noise. A good rule of thumb is to use an area of
three by three resolution elements, or 7.5 ft (2.3 m) square, as the minimum
identifiable anomaly area. Thermal imagery was not flown over the sites
at Thebes, since the targets there were most liable to be deeply buried
in vertically oriented cliff faces, and therefore were not easily included
in the view angle of the airborne scanner.
Two types of thermal imagery were flown, although both had the same
specifications. One, the thermal channel of the M2S scanner,
has a digitized presentation on a color television screen, while the second,
a single-channel scanner, records directly on film. Which has the best
performance is open to question, but for our purposes the ease of interpretation
of the direct film process in the single-channel scanner makes it preferable.
An example of the digitized output of the thermal channel, using arbitrary
colors, is given in Figure 13. This image is of the pyramid complex of
Chephren viewed from the east face, and shows the open boat pits, which
are warmer (blue in this image) than the surroundings. The mortuary temple
also shows up warmer than the sand and paving stones, as does the north
entrance to the pyramid. The two dark blue spots on the south side are
3-by-3-m black paper and aluminum foil markers spaced 100 m apart for scale.
A similar image of north, west, and south faces of Cheops' pyramid in
daytime is shown in Figure 14. The funerary boat museum on the south side
stands out clearly, together with the remnants of the enclosing wall covering
the unopened boat pit to the west. The apparent high noise level in these
images makes searching and interpretation of small features very difficult,
and it is hoped that the single-channel scanner will exhibit a better signal-to-noise
ratio.
B. Magnetometry
The magnetic field of the earth, though very weak, is easily measured
with very high precision by various types of modern magnetometers, two
of which lend themselves to archaeology. The natural field of the earth,
averaging about 50,000 gammas (equal to 0.5 ´
10-5 gauss or 0.5
´ 10-9
webers/m2) in intensity, changes diurnally by about 50 gammas
and is altered by as much as 100 gammas by solar-induced magnetic storms.
Over local areas the earth's surface static field is modified by magnetic
ore bodies, by metallic iron, and to a lesser extent by cavities or changes
in subsurface materials (e.g., by a transition from mud brick to natural
soil). In comparison with other influences, archaeological anomalies have
only a very small effect on the earth's field. Magnetometry cannot be expected
to work wonders for archaeology (unless, of course, a tomb happens to be
full of iron), but with care useful data can be obtained. Magnetic anomalies
may exist at archaeological sites because culturally introduced features
are either more or less magnetic than their surroundings. This factor is
largely due to the amount of magnetite in a material, since nonferrous
substances are only very slightly magnetic in comparison with iron.
Figure 13
& 14
Remnant magnetization in objects is a result of the orientation of very
small magnetic domains formed during a cooling process following intense
heating, where nonrandom alignment with the earth's field can sometimes
occur in fired bricks, pottery, or tiled or baked clay. Another type of
anomaly occurs when soils or rocks introduced into an area by man may be
sufficiently different in magnetic properties to be detectable. With regard
to Egypt, Professor K. P. James of the University of Liverpool has measured
the magnetization of mud bricks from Saqqara.20 A mud brick
wall 1 m wide and 2 m deep is expected to give an anomaly of 10 to 30 gammas
at the surface, as sketched in Figure 15. Voids in a nonmagnetic material
such as limestone present much smaller anomalies, however.
Dr. Elizabeth Ralph's work at Malkata21 demonstrated that
magnetometry can be very useful in Egypt. Our magnetometry data are sparse
because of the small amount of time devoted to magnetic survey work, and
do not do justice to the potential value of the method for use in Egypt.
The project was able to borrow two GeoMetrics Model G 816 portable proton
precision magnetometers for use on the project, courtesy of Mr. Charles
Kenworthy of The Quest Exploration Corporation. These instruments, with
resolution better than one gamma, read the magnetic field once every 5
seconds at the push of a button, displaying the numerical value on a convenient
readout. After checking himself for magnetized objects on his person (such
as pocket knives, belt buckles, or shoe nails) an operator can easily survey
an area simply by pacing a traverse across a region of interest. The readout
must be checked for diurnal changes using a second magnetometer or by returning
occasionally to a fixed reference point.
Figure 16 is a plot of the measured magnetic field of the earth along
the north and west sides of the Sphinx, determined in about an hour of
working time while resistivity work at the Sphinx was under way. The background
magnetic noise level was very low; the only significant anomaly is that
due to an iron cover on a light bank used to illuminate the Sphinx at night.
Also, iron doors are found between the paws and on the southern side of
the Sphinx, so time was not spent traversing these areas. The iron doors
and buried lighting cables around the Sphinx could be temporarily removed
to provide a uniformly magnetically quiet area, but it is doubtful that
this would be worth the effort. If anything interesting beneath the Sphinx
exists, it is likely to be a shaft or cavity, probably now filled, which
would have a very small magnetic anomaly. In fact, cavities or voids cannot
normally be detected by a magnetometer if the cavity is much deeper than
its own diameter.
Figure 15
& 16
The magnetic anomaly of a buried archaeological object can be calculated
from the formula:
T = (kF D3)/r3 gammas
where k is the magnetic susceptibility contrast per unit volume, F is
the earth's field intensity in gammas, D is the object's dimensions, and
r is the distance from the center of the object to the surface. Several
examples of archaeologically typical magnetic anomalies are given in Figure
17. This figure is adapted from S. Breiner.22
At Saqqara the magnetometer was traversed over the top of the lower
baboon gallery near its terminus (Figure 18). The gallery lies about 10
m below the surface and is about 2.5 m high and 1.5 m wide. The presence
of the gallery could not be detected by the magnetometer; neither could
the nearby ibis galleries with their many side-chambers filled with thousands
of clay pots. The ibis galleries to the west could also not be located
from the surface in any of three magnetometer traverses over the surface
above them. Next, the magnetometer was taken into the falcon galleries
and down several of the side extension galleries past niches containing
the falcon-filled clay pots. No magnetic anomalies from the pots could
be observed even during traverses within 1 m (or less) of the niches. Time
did not permit studying buried mud brick walls, although a measurable anomaly
is expected as discussed above.
No magnetometer measurements were made in the Valley of the Kings because
of the difficulty of making traverses across the many rubble piles and
the presence of many buried electric power cables and iron doors closing
tombs in the area.
A number of magnetometer measurements other than the Sphinx were made
at Giza. On the west side of Chephren's pyramid (Figure 19), for example,
a large anomaly was detected by the team using both the resistivity meter
and acoustic sounder. The area was therefore also traversed with the magnetometer.
However, the only magnetic anomalies located by this method were from steel
rails that had been used by the Antiquities Department for removing debris,
and from steel gratings on some of the rock-cut tombs in the west cliff
face. Three traverses with probes 2 m apart were spaced 6, 18, and 24 m
from the bottom course of the pyramid. The resulting data are shown in
Figure 20.
Figure 17
& 18 &
19
Figure 21 is a plot of the data from three other magnetometer traverses
along the south side of Chephren's pyramid. These traverses were 6, 12,
and 18 m to the south of the lowest course of stone. The 6-m traverse was
at the edge of the paving stones around the pyramid base.
Figure 22 is a photograph of an area of interest on the south side,
near the east corner, subsequently studied more carefully by cleaning and
limited excavation. The foundation blocks in this area are more than 3
m thick, as revealed by borescope observations in a crack. The borescope
was not sufficiently long to see under these blocks where visual observations
from the surface seemed to indicate a hollow space. Figure 23 indicates
the depths to which we drilled in this area. The magnetometer revealed
no anomalies (except that the effect of an old excavation opening is visible
on magnetometer Traverse 1, as shown in Figure 21). Both resistivity and
acoustic anomalies occur in the vicinity of the eastern corner of the south
side of this pyramid.
Magnetometer traverses were made across the lids of two of the covered
boat pits of Chephren on the east side of the pyramid. The lids are two
layers of stones totaling about 1 m thick. The southern pit (about 1 m
wide and 2 to 4 m deep) presented a good magnetic anomaly (Figure 24),
but the similar northern pit gave a much less striking anomaly, possibly
because of a high magnetic gradient in the immediate area.
The absence of magnetic anomalies at Giza and around the second pyramid
does not surprise us, since no appreciable magnetic changes are expected
in these media such as one would find in an area where brick walls were
covered with silt or sand.
In conclusion, magnetometry can be useful in Egypt for detecting cavities
and mud brick walls near the surface, but is of no value in locating deep
tunnels or tombs. Clay pots used in the animal necropolis galleries at
Saqqara appear to have insignificant magnetic anomalies. Magnetometry can
be useful in support of acoustics and resistivity because traverses can
be made very rapidly, provided the area is free of recent artifacts or
buried power cables.
Figure 20
& 21 &
22 & 23
&
24
C. Resistivity Measurements
1. Background
Measurement of electrical resistivity in the earth has been used for
many years as a geophysical tool to investigate subsurface conditions.
Developed originally as a means of exploring for deep-seated oil and mineral
deposits, this method has also found application in delineating near-surface
buried features with a resistivity different from that of the surrounding
soil or rock. In recent years, resistivity surveys have been conducted
to define areas where the apparent resistivity is affected by buried archaeological
features, as for example in the work of the Lerici Foundation in finding
the location of the Etruscan tombs as discussed by Tagg.24 In
the case of our work in Egypt, the targets were usually shallow tunnels
or tombs that could be expected to produce well defined high-resistivity
anomalies. Interpretation of such anomalies is greatly assisted by the
use of families of standard curves such as those published by Van Nostrand.25
Using these curves it is usually possible to fit a simplified model to
any given experimental set of data.
Equipment to measure resistivity consists of a controlled source of
electric current and a device for measuring the potential differences generated
by the current passing through the earth (Figure 25). Typically, four electrodes
are used in resistivity measurements. The volume of subsurface material
influencing the resistance measurement is controlled by the spacing and
geometry of the electrodes. Some common geometries are shown in Figure
26, with the three basic regions about the current electrodes being shown
in Figure 27. Many factors go into the choice of array configuration for
a given problem. Susceptibility to geological noise, ease of array movement,
and the nature of the assumed model for the target are just a few of the
factors to be considered. For the bulk of the data acquisition efforts
in Egypt, we used the simple Wenner array for both profiling and sounding.
Figure 25
& 26 &
27
One of the fundamental principles of resistivity profiling is that the
depth of the subsurface material contributing to the resistivity reading
increases as the electrode spacing increases, so that by symmetrically
expanding an array over a given spot one can deduce changes in resistivity
at increasing depths and thereby infer the presence of layering or nonuniformities
in the subsurface. This process is called a resistivity sounding, as opposed
to a profile (or traverse) where the electrode spacing remains unchanged
while the center of the array is sequentially moved along a surveyed line.
In the data shown in this report, each resistivity plot shows the values
at several electrode spacings, giving a rapid means of checking the apparent
depth of the anomalies. The data plotted have been subjected to a three-point
smoothing process before plotting. A typical resistivity profile, showing
an anomaly from a known tunnel, is shown in Figure 28. The large anomaly
is due to the lower entrance tunnel of Chephren's pyramid, Figure 29. The
resistivity array in this case was placed so that electrode 14 was over
the roof (Figure 30) of this sloping tunnel.
Figure 28
The ability to discern the approximate depth of an anomaly can be inferred
from the three curves shown in Figure 28. In this case the known tunnel
(Figure 29) is 1 m below the surface, so the greatest anomaly occurs on
the "l m spacing" profile, as shown in Figure 28. In the resistivity profiles
obtained in Egypt, readings were made along a surveyed line on the surface,
and then repeated at several larger electrode spacings in order to obtain
as complete a picture as possible of the structure of the subsurface material.
Simple subsurface geometries, such as a two-layered medium for example,
give characteristic resistivity sounding curves that are well tabulated
in standard texts. Interpretation of the data in such cases reduces to
matching the experimentally determined curve with one of the tabulated
families of similar curves. Complicated geometries are not easily interpreted
in this manner, and one frequently has to resort to matching parts of the
curve separately. In the case of most of the work in Egypt, the medium
was either solid bedrock containing voids, or, at worst, a two-layered
medium with voids. We were not therefore faced with severe interpretation
problems from this source. Much more important to our work was the problem
generated by natural nonuniformities in the bedrock, such as faulting or
minor fractures, which gave rise to signatures similar to those from man-made
voids. In locations where this problem was apparent, the only hope of resolving
the two alternative interpretations was to take dense data samples in several
directions across the anomaly in the hope that the man-made voids would
take on a characteristic shape or position suggesting an unnatural origin.
For example, a straight-line anomaly emerging at 90°
to a pyramid face would be most likely due to a man-made structure--cracks
are more likely to be randomly oriented and not straight.
Figure 29
& 30
In the Wenner array we used in Egypt, the electrodes were spaced equidistant
along a line, with the current electrodes on the outside and the potential
probes in between. In order to speed up the data acquisition process, an
electrode array was employed, consisting of 24 electrodes addressed by
a switch box. By addressing a series of equidistant electrodes with the
manual switches, a resistivity profile could be taken in about ten minutes,
giving us the ability to take about 600 data points per day. This improvement
of a standard resistivity meter could be carried further in the future
by developing an automated resistivity set built around a microprocessor
for controlling the electrode switching, constant current control, electrode
continuity checking, automatic calculations, and data logging with automatic
plotter in the field. The basic meter we used was a Stratascout Model RC-40
set manufactured by Soiltest, Inc., and was a low-power unit designed for
shallow work (less than 30 m) operating at 65 Hz. (Alternating rather than
direct current is usually used in resistivity sets to cancel out contact
potentials at the earth electrode interface.) The electrodes themselves
were standard 50-cm brass rods in the case of work on sandy terrain, or
small flat disks coupled to the rock with a stiff mud slurry in the case
of hard rocky terrain. Initial attempts to couple the electrodes to rock
with sponges soaked in a saline solution failed because the moisture rapidly
drained out of the sponge and altered the effective resistance of the current
path. The mud slurry gave constant readings for up to half an hour. A photograph
of the disc electrodes and the switching array appears in Figure 31. The
switching arrangement used had one substantial advantage over the more
usual Wenner method of "leapfrogging" the last electrode to make the new
array position, in that the whole array could be moved to increments that
were smaller than electrode spacing, thereby giving us more dense data
and the consequent ability to integrate out single-point noise. This ability
proved to be invaluable when working over the paved areas of the pyramids,
where joints in the paving always introduced noise into the data.
Figure 31
In operation, the minimum electrode spacing, usually 2 m, was selected
and the potential measurement recorded. For the next measurement, the switches
were incremented by one position and the measurement repeated and so on,
until the last measurement was recorded. For the succeeding sets of measurements,
every other electrode was selected, giving an effective spacing of 4 m,
6 m, and so on. In this way, we were able to penetrate to greater depths
and record information about the various strata penetrated. Some experimental
work was also performed at Saqqara using a pole-dipole array; this is described
later.
2. Interpretation of the Data
Since there were some 6000 data points involved in the various surveys
in Egypt, the data were all entered into SRI's CDC 6400 computer for processing
and plotting.*
Initially, two sets of plots were made (Figure 32), one with the raw data,
and a second with a three-point running average through the profiles. This
average, with equal weighting, was particularly effective in reducing the
large variations in the data caused by the array moving across a joint
in the paving surrounding a pyramid plaza.
Sounding data taken at each electrode array location were not plotted,
but were used to check the values of resistivity given by the various profiles
for a given location. After all the data were plotted, regions of high
resistivity, corresponding to potential voids in the subsurface, were entered
on a vertical (plan) view of the area, for a final presentation.
One further degree of sophistication we could have used is the Barnes
layer method26 to evaluate the actual resistivities at each
depth rather than the apparent resistivity. This procedure tends to enhance
the anomalies due to voids such as tunnels or tombs, and might prove valuable
in cases where the tomb was partially filled with sand and therefore presented
a weak resistivity contrast to the surroundings. The method is at its best
when used with data of low variance (or low noise level in our case), so
we have not used it thus far.
3. Resistivity Measurements at Giza
One of the first sites used for the resistivity method was the covered
boat pit on the south side of the mortuary temple of Chephren. All the
roofing blocks over this pit were intact (Figures 33 and 34), and the pit
had two openings, on the south side and the east end. Thus, the pit's dimensions
could be measured, and its resistivity signature could serve as a guide
in interpreting other Anomalies in the Giza area. A set of profiles over
the pit is given in Figure 35. Striking signatures were obtained at small
(1 m) electrode separations. This particular boat pit is almost an ideal
target, since it has no fill from windblown sand or debris, and, what is
more important, has a very shallow depth of burial compared with its own
dimensions. Depth-to-size ratio is a very critical factor in the detection
of cavities by resistivity methods. A commonly used rule of thumb is that
a cavity becomes undetectable by resistivity methods when its depth of
burial is greater than three times its diameter. In perfectly uniform host
rock, this number might be extended to as much as ten,27 but
in the setting found at both Giza and Saqqara, we would not expect to exceed
a ratio of three, mainly because of the "geologic noise" expected from
cracks in the bedrock or paving stones, and irregularities in the bedrock
itself. In particular, the bedrock around the second pyramid is extensively
faulted. Also, most shafts and tombs, when first discovered in Egypt, are
filled with rubble. This does not eliminate, but does reduce, their resistivity
anomaly, and they are less easily located than empty voids.
Figure 32
& 33 &
34 & 35
Resistivity profiles were made on sections of the plaza of all three
of the major pyramids of Giza, with the greatest emphasis on the second
pyramid (Chephren) where data were taken on all four sides. In addition,
some profiles were made around the Sphinx and in the interior of the second
pyramid. We also measured the debris thickness around the third pyramid.
The west side of the pyramid of Chephren, and most of the surrounding
areas of that of Mycerinus are liberally strewn with debris, consisting
of broken limestone, granite, gravel, and sand, all of which produce a
resistivity profile with a noisy background. The remains of a haulage railway
still exist on the west side of Chephren's pyramid (see Figure 19) causing
data taken close to the pyramid on the southwest half to be less reliable.
A complete map of resistivity profiles obtained around Chephren's pyramid
is shown in Figure 36. A number of anomalies were located during our resistivity
work around the second pyramid, including one on the west side later identified
as a tomb that had been opened in 1966 by Dr. Ali Hassan.28
The anomaly here was considerably larger than one would expect from a tomb
of the dimensions described in Dr. Hassan's paper, and seems to indicate
the existence of more unexplored cavities in the vicinity of the original
find. A number of anomalies are deep, as shown by the 4-m-electrode-spacing
data, implying that high resistivity exists to depths of 4 to 6 m at several
locations around the pyramid. The largest of these deep anomalies are:
(1) Northwest corner, west side, 6 m out from the base of the pyramid
(Figures 37 through 39).
(2) West side, associated with tomb excavated by Dr. Ali Hassan (Figure
40).
(3) West side, associated with known shaft.
(4) South side, southeast corner, region of 3-m foundation blocks (later
drilled for confirmation).
(5) East side, center, between mortuary temple and pyramid face, suggesting
a tunnel (Figure 41).
(6) North side, to the east of the lower pyramid entrance over blocks
set in pavement, suggesting a filled shaft or zone of poor rock (Figure
42).
(7) South side, west of center, over small stones inset into bedrock.
Figure 36
& 37 &
38 & 39
&
40
A number of other resistivity highs appeared, but were of lesser magnitude.
Figure 43 shows the location of two traverses taken inside Chephren's
pyramid along the main horizontal passage leading to Belzoni's Chamber.
Figure 44 presents the profiles, and Figure 45 is a photograph of the instrumentation
in place. High-resistivity values were encountered where the passage enters
the chamber, and even higher values were found along a portion of the passage
where blocks were inset into the passage walls and floor where the passage
crosses a fault system. Somewhat surprising, and unexplained, are the high
values centered around 18 m from the north end of the traverse. Data from
the larger electrode spacings (sounding to greater depths) suggest either
a deep crack in the bedrock at that point, which is not apparent visually
in the tunnel, or some other anomaly at a depth of 4 m or more below the
passageway. This latter anomaly could be a tunnel and should be checked
by drilling and borescope observation.
Figure 41
& 42 &
43 & 44
&
45
Although the work around Chephren's pyramid comprised the major fraction
of the effort on the Giza plateau, other sites were also examined. The
limestone bedrock close to the east face of Cheops's pyramid was traversed
(Figure 46), but the data were not considered reliable due to the low values
of current we were able to inject into the ground. Traverses of the black
granite at that location produced good data but no noticeable anomalies.
Similarly, two profiles taken along the west face by Mycerinus's pyramid
produced no definable anomalous areas. We were able to determine, however,
that rubble 8 or 9 m deep covers this area above the pyramid platform.
4. Measurements at the Sphinx
Several anomalies were observed as a result of our resistivity survey
at the Sphinx. The locations of our traverses are shown in Figure 47. A
very limited number of measurements were taken due to the time scheduling
of the project. As a result of the survey, the team discovered five areas
of interest.
Behind the rear paws (northwest end) we ran two traverses (Numbers 206
and 207). Both traverses indicate an small anomaly that could possibly be
due
to a tunnel aligned northwest to southeast. (See our later resistivity
work done in 1978, Geophysical Studies Around
the Sphinx).
Another anomaly exists in the middle of the south side near a square
cupola added apparently in Roman times. This anomaly was verified by two
overlapping traverses (Numbers 201 and 202). When the electrodes were moved
2 m away from the previous traverse, the anomaly decreased in value. This
is typical of the behavior expected from a vertical shaft. The data are
displayed in Figure 48 and a photograph of the array site is shown in Figure
49.
Figure 46
& 47
There are two anomalies in front of the front paws of the Sphinx. The
bedrock in front of the Sphinx is covered with Roman-era paving stone (Figure
50) and poor electrical contact between the paving stones and bedrock gave
somewhat noisy resistivity traverses. However, one anomaly occurs on large
electrode spacings, suggesting a cavity or shaft as much as 10 m deep.
The cavity, if present, is probably filled with rubble. The relevant resistivity
profile is shown in Figure 51.
The bedrock in the area surrounding the Sphinx seems to be competent
limestone lacking obvious fissures or veins of mineralized material as
observed from the surface. A shallow gully-like area runs southwest to
northeast on the south side of the Sphinx approximately one foot wide.29
The resistivity anomalies we found around the Sphinx are not defined
sufficiently to allow us any absolutely certain conclusions, and we feel
that a more detailed survey should be conducted, with the arrays run at
1-m electrode spacings and with many more traverses to form a matrix. In
this way, it is possible with standard resistivity procedures to generate
a three-dimensional map of the subsurface anomalies. Using such a map,
we could then also profitably deploy our acoustic sounder followed by borescope
photography. We recommend that all anomalies be confirmed in this manner
prior to any excavating in the area.
5. Suggested Work at Giza
The resistivity method worked well at most of the sites investigated
on the Giza plateau, even though we were not certain ahead of time how
successfully we could sound into rock. Only in the one case of the highly
resistive limestones to the east of the first pyramid did we encounter
difficulty in obtaining readings, because the background resistivity values
there were very high. Everywhere we worked, known voids and tombs did indeed
show up as expected, as regions of high resistivity. In addition, a number
of other regions not associated with known subsurface features displayed
similarly high values of resistance, and should be investigated further.
Due to time and budget constraints, it was not possible to take as much
data as we had hoped, or to use a smaller spacing of one data point every
square meter so that three-dimensional contours could be drawn outlining
regions of anomalously high resistivity. More resistivity survey work at
Giza would be a worthwhile effort, since the method allows on-site estimates
of the size, shape, and depth of the region causing the anomaly, as a guide
to excavation. The method is also time and cost-efficient.
Figure 48
& 49 &
50 & 51
Of particular interest in view of the size of the resistivity "highs"
encountered are the regions in the Belzoni Chamber entrance passageway,
in the middle of the north and east faces of the second pyramid, the north
corner of the west face of the second pyramid, and the Sphinx platform.
In view of the findings of the acoustics team within Cheops' pyramid,
resistivity traverses within the first pyramid are also appropriate.
All of our work at Giza was facilitated through the good offices of
Chief Inspector Nassef Hassan.
6. Measurements at Saqqara
The geologic setting at the site of the Saqqara Necropolis (Figure 52)
is rather similar to that of Giza--the bedrock is poor-grade limestone
overlaid with wind-blown sands from the western desert, and in many regions
liberally covered with potsherds and debris from previous excavations,
many of which have been haphazard and unsystematic.
After examination of the north Saqqara area with the Chief Inspector
Dr. Ali El Khouli, it was decided to make the initial measurements over
sections of the Falcon Galleries (Figure 53), where the size, direction,
and depth of the gallery were known. The layout of the traverses is shown
in Figures 54 and 55. The galleries were detectable (for example, see Figure
56), but not on every traverse. Galleries not shown on any map were detected
during several of the traverses. The data over this region exhibited a
high noise level attributable to the large amounts of fill material that
had been spread over the surface in modern times. It is felt that a dense
array of data over a larger area could be interpreted with much more confidence,
and hopefully that an easily recognizable pattern of highs would emerge
that outlined the underlying galleries. We were not able, in this set of
profiles, to answer the question of whether the method was capable of detecting
sand and debris-filled galleries. This again could only be determined by
a more extensive effort. An estimate of the time required for an extensive
survey can be gained from our rate of 500 m2 per full day of
data taking, at a density of one point (for all electrode spacings) every
2 m.
Figure 52
& 53 &
54 & 55
&
56
In order to move away from the heavily contaminated areas close to the
Falcon Galleries, a long profile was made across the valley 50 m west of
Tomb 3508, heading 330° to a hill containing
a number of tombs (Figure 57). This area is thought to be where Lepsius
discovered additional sacred animal galleries in 1842.16
The locations of subsequent traverses are shown in Figures 58 and 59.
Figure 60 shows the results from traverses on the hill, with the maxima
plotted. A reasonable interpretation from the linearity observable would
be that the high regions are caused by a man-made tunnel or gallery. Plotting
the limited amount of data as a contour map, one achieves the pattern in
Figure 61, which shows a broad pattern of high resistivity, possibly due
to natural causes. Again, more data over the entire area would almost certainly
resolve this ambiguity, but even with the data shown it seems unlikely
that the high region is naturally caused. The photographs in Figures 62
and 63 show the region in question. The resistivity high follows the shallow
valley, where one would normally expect a resistivity low from drainage
considerations. But, since moisture in the region is very scarce, it could
equally well be argued that windblown sand has filled this ancient depression
so that it has remained perpetually dry, thus maintaining its high resistivity.
From the other data taken at the Saqqara region, it seems to us that the
anomaly is too sharply defined to be due to natural causes, and we would
tend to believe in the existence of an underlying man-made feature such
as a tunnel.
Figure 57
& 58 &
59 & 60
&
61 &
62 & 63
In the long traverse across the valley where several anomalies were
found, we wondered how many other structures there are in this area. We
used radar without success in 1974 on the pyramids of Giza. However, at
Saqqara the windblown Sahara sand has very low RF loss, and subsurface
mud brick structures present a sharp dielectric contrast. These combinations
should produce sharp echoes on ground-penetrating radar. With the radar
we could also use a recently developed mobile sensing platform that consists
of a cordless, lightweight, hand-towed cart.
The output from this sensing platform is automatically transmitted by
a radio link to a receiver located in a mobile vehicle parked at some convenient
distance where the data can be processed by a small computer. Simultaneous
with the sensor operation, a position-location system records the cart's
position on the horizontal plane (to an accuracy of about ±1
ft).
We suggest that this combination of radars and automatic cart would
be useful in mapping archaeological features beneath windblown sand fill
at Saqqara, such as the valley of the former Lake Abusir.
The long traverse across the valley shows extraordinarily high values
of resistivity (Figure 64), suggesting the presence of drifts of windblown
sand to depths of between 4 and 8 m. Some dramatic resistivity highs are
apparent (Figure 65). Some resistivity anomalies were confirmed by digging
a few inches in the sand. At a point 215 m along Traverse 116, there was
visible evidence of mud brick structures and a possible shaft, correlating
well with the 1300 ohm-meter high at that point. The large features at
75, 150, 180, and 325 m need further explanation, however, since there
was no obvious cause for such a high resistivity contrast at these
points.
Figure 64
& 65
We found that the noise level on our resistivity meter decreased noticeably
as we moved away from the much-excavated region of the sacred animal galleries
and westward into the valley. Consequently, one can view the anomalies
in Traverse 112 with a higher degree of confidence, and attribute them
to shallowly buried structures that are probably man-made. Since the bedrock
in this area is less resistive than the sand, any protrusions of the bedrock
from the valley floor would produce resistivity lows rather than the highs
observed. This is consistent with our conclusion that the highs are associated
with buried man-made structures.
A Bristow (pole-dipole) resistivity array was utilized for a short period
at Saqqara over the Falcon Galleries for comparative purposes. This array
has one current electrode (C2) placed a large distance, as compared
to the other current electrode (C1), from the potential-measuring
electrodes (P1, P2) as illustrated in Figure 66.
Figure 66
The array is designed to use the "field about a point" region shown
in Figure 27. In this region, the equipotential lines form shells about
the current electrode C1, and any resistivity discontinuity
occurring in the shell between P1 and P2 will be
observed at the surface, but its location within the shell will still be
unknown. Repeating the traverses with different positions of C1
allows further shells to be drawn, each including the observed resistivity
anomaly. The intersection of two or more anomalous shells defines the volume
containing the region of high resistance. Ideally, the method not only
locates the region in all three dimensions, but also gives a crude approximation
of its shape. Unfortunately, the Bristow method works well only in areas
of uniform resistivity containing few anomalies, and becomes rapidly unworkable
in areas with high levels of resistivity noise. The optimum spacing between
P1 and P2 should approximate the characteristic size
of the object, in this case the diameter of the tunnel being searched for.
The operation of the array consists of moving P1 and P2
systematically along a fixed line while maintaining C1 at a
fixed position. The current electrode C1 is then moved to a
new position along the same line and the whole process is repeated, thus
generating a number of sets of data. We used four positions of C1
and plotted the data to include known positions of the tunnels or galleries.
The resistivity highs we measured occurred at about the right positions;
however, other resistivity peaks corresponding to tunnel crossings should
have occurred at other positions along the line but do not appear in the
data. Therefore, without a prior knowledge of the existence of the tunnels,
the peaks might not have been interpreted correctly. Alternatively, one
could have said that the peaks were caused by lateral variations in the
resistivity occurring near the surface, and not necessarily by tunnels.
In conclusion, the Bristow array did not give decisive unambiguous results
during our trials at Saqqara and does not recommend itself for routine
use in this application.
7. Summary
The data taken at Giza and Saqqara illustrate several points regarding
the use of resistivity in archaeological exploration. The method undoubtedly
detects shallow tombs, pits, and tunnels, provided that their depth of
burial is not more than a few times their diameter. The maximum depth-to-diameter
ratio consistent with good results is a strong function of the uniformity
of the host rock, and the related noise levels in the data. For tombs or
tunnels in undisturbed bedrock with little fracturing, the situation is
close to ideal, and excellent resistivity results can be obtained. For
areas such as the Giza plateau, where paving stones, cleaning debris, and
faulting introduce a high noise level, confidence in the method must be
less, although in the case of Giza some of the anomalies noted were so
large that they should not be ignored.
The final evaluation of the utility of the method must come from a combination
of data taken over known tombs, and the results of a carefully selected
drilling program. We feel that the feasibility of the method has been demonstrated,
and that the next stage in the work at both Giza and Saqqara is to increase
the density of the data and to follow up with a limited drilling program
and subsequent excavation as indicated by the results of borescope observations
in drill holes.
D. Acoustic Sounder Measurements
1. Background
Radar and acoustic sounding have distinct advantages in archaeological
applications. Without digging or disturbing the area, the range and locations
of underground objects, voids, and tunnels can often be detected quickly
and easily. Unique underground radar and acoustic sounding systems suitable
for archaeological use were developed for this application under sponsorship
of SRI internal funds. The development work leading to the present acoustic
sounder equipment is summarized in Appendix A. To our knowledge, neither
acoustics nor radar has previously been used in archaeology, with one or
two minor exceptions.30,31
As mentioned in the first section of this report, electromagnetic ground-penetrating
radar has good demonstrated capability in dry soil, sand, or rock. While
radars have performed well at archaeological sites in the southwestern
United States, we have found them to be suitable only for penetrating wind-blown
desert sand at Egyptian sites as mentioned in our discussion on resistivity
in Section IV-C. Egyptian limestone and excavation debris are usually characterized
by very high radio frequency attenuation values. Resistivity measurements
confirm the prevalence of these high losses, except for the desert sand.
In our experience, acoustic sounding works best in competent rock, but
can also be useful in sand or soil media. In contrast to radar, acoustic
sounder performance usually improves if the medium is damp or wet. The
penetration-range capability achieved during the present project (approximately
35 to 70 in competent rock) is comparable to probing depths for electromagnetic
radar when the latter is operating under favorable conditions.4
While electromagnetic radar and acoustic sounding are in many ways similar
and complementary, electromagnetic waves are always transverse--that is,
the electric and magnetic vectors comprising the wave (themselves at right
angles to one another) always travel perpendicular to the energy-carrying
field vectors. Sound waves in rock can be transverse (shear waves) or longitudinal
(compressional). Shear waves are stopped by any cracks or voids, but compressional
waves are affected to a lesser degree. If a wide air space is encountered,
a longitudinal wave traveling in rock produces a weakened compressional
acoustic wave in air at the interface, but a shear wave is stopped virtually
completely. If the air space is small (for example, if two rocks are in
slight contact),compressional waves in rock may be transmittable to some
degree across the interface. In our research we found that compressional
waves travel very well across loaded joints (for example, vertically through
the blocks of a pyramid), but less well when the joints are in light contact,
as in horizontal propagation through a pyramid. Shear waves are of little
interest to our work in archaeology, though these waves, and others, do
occasionally appear on our records (see Appendix A).
Like radars, acoustic sounders have several important parameters that
depend directly on the wavelength in the medium. Two important parameters
affecting performance are the target size and shape. The scattering cross
section (or effective scattering area of the target) usually increases
with decreasing wavelength. Figure 67 shows the variation of cross section
with wavelength for a sphere. At long wavelengths the probing wave "flows"
around the target and the fractional signal scattered back in the direction
of the receiver is much smaller than the geometrical cross-sectional area
of the target. At short wavelengths compared to the target dimensions the
target is a good reflector (Figure 68).
Figure 67
& 68
Resolving power of a radar, optical device, or acoustic sounder is the
ability to distinguish between two targets closely spaced from one another.
If the targets lie at slightly different ranges, as in Figure 69(a), the
echo from the second target will arrive later than that from the first,
so they may overlap, causing a complex echo (see Appendix B). Targets next
to one another at the same range [Figure 69(b)] can generally be distinguished
if they are separated by a distance, d, greater than about one wavelength.
For an acoustic wave having a frequency of 1000 Hz propagating in Giza
limestone, resolution was found to be about 3 m. In sand, at this same
frequency, the resolution attained was nearly half a meter. We found that
better resolution could be attained by operating at higher frequencies
with a sacrifice of penetration range. In Egypt, the sounder was often
operated at 4000 Hz, yielding resolution in Giza limestone of about half
a meter or about one-tenth of a meter in sand.
Figure 69
A parameter similar to the resolving power of a sounder is the ability
to distinguish nearby objects from the transmitted pulse and clutter.*
Because of the presence of the transmitter pulse and the clutter that immediately
follows the cessation of the transmitter pulse, the receiver experiences
a certain "dead time" interval before useful echoes can be obtained. In
practice, at 1000 Hz propagating into Giza limestone, wanted echoes from
the first 10 m in range were obscured by and indistinguishable from the
transmitted pulse and clutter echoes. This problem was alleviated by shifting
to a frequency of 4000 Hz, in which case the clutter obscured only the
first two meters of the data. However, since attenuation of sound in rock
increases with increasing frequency, the maximum range of the instrument
is lower at 4000 Hz.*
The remaining important factor to be considered in acoustic sounder
operation is that while one desires as high an operating frequency as possible
to provide best target resolution, minimum detection range, and details
in the echo telling something about target shape and size, the increasing
attenuation of sound with increasing frequency makes compromise often necessary.
One must choose a long wavelength to penetrate deeply, knowing that some
resolution will be sacrificed. Sounder versatility is of course a desirable
design feature, so that choices of wavelength, pulse length, and pulse
rate can all be tailored to the particular archaeological area under study.
As in radar, FM-CW devices can be designed for acoustic sounding. This
technique sweeps the frequency over an interval Df
during a transmitter pulsewidth of T. The data can be processed so the
range resolution can be increased by a factor close to TDf.
This is called pulse compression, since the method has the effect of shortening
the pulse. Sensitivity can therefore be increased by lengthening the overall
pulse length and increasing the total power transmitted without losing
resolution. However, equipment linearity, especially that of our transducers,
is critical, and usually limits an FM sweep to a few kilohertz. If Df
is small, then T must be greatly increased to gain any pulse compression.
In our case the pulse compression of this necessarily longer pulse does
not result in greater range resolution than our present non-FM equipment--e.g.,
for T = 0.001,
Df = 1000, we have pulse compression
p » 1. A large-scale development program
would be necessary to explore this area.
Unwanted and difficult-to-interpret echoes can be caused by discontinuities
in the media such as large planar surfaces. For example, stacked pyramid
blocks produce reverberant echoes due to internal multiple scattering in
the blocks, but gravel appears transparent to our sounder. This is due
to the fact that the wavelength is large compared to the stone size in
gravel. The acoustic sounder operated well when used within chambers cut
into bedrock. From such rooms it was easy to search in all six directions
for anomalies in the rock such as other tombs, faults, or cavities. Radar
has been found to work less well inside tunnels or cavities in some cases
because of unwanted scattering of air-propagated electromagnetic energy
within the tunnel.
2. Equipment Characteristics
At present, all of the transducers we have used are commercially available
units. Typically, they have dimensions in the 10-to-30-cm range, and the
better models employ one or more lead zirconate titanate piezoelectric
elements. The electric-to-acoustic conversion efficiencies of these units
are as high as 50% Lack of time prevented us from obtaining custom-built
transducers for operating into rock or soil. Neither was it possible to
devote adequate time to proper electromechanical damping to prevent ringing
in the units.
Optimizing the transducer design for acoustic sounders is similar to
optimizing antennas for ground-penetrating radar. Low-Q (or, the same thing,
very-broad-bandwidth) devices are needed. One desires to propagate a very
short pulse into the rock medium. In the case of radar operating at 100
MHz a single RF cycle of energy occupies a spatial distance of about one
meter in Giza limestone. An acoustic pulse one cycle long at 4000 Hz in
the same material is 3/4 m long. Antennas or transducers that are not properly
damped or that couple poorly into the rock medium invariably ring for several
RF cycles even when the desired single-cycle pulse is delivered to their
electrical input terminals. The acoustic transducers used in the present
sounder can be greatly improved, given adequate preparation time before
future field work.
All the acoustic frequencies used to date have been above 600 Hz because
of the high ambient ground noise levels below that frequency (see Figure
70). For "long-range" applications--say, up to 50 m in rock--frequencies
in the 1000-Hz region were employed. For shorter range, up to 10 m, and
for higher resolution, operations were conducted at 4000 Hz. Our pulser
allowed selection of six frequencies from 750 to 8000 Hz.
Figure 70
Power input to the transmitting transducer was typically 100 watts pulse
power. That is, the power level is 100 watts during the pulse time, but
average power is one watt because the pulse is on 1% of the time (pulse
on 1 ms, pulse off 99 ms, next pulse on 1 ms, etc.). The power amplifier
was a solid-state, 24-volt, battery-operated unit with a 250-watt average
output capability and a 50-ohm output impedance.
All of our data in Egypt were collected with a pulse repetition rate
of 10 pulses per second. This gave a maximum interpulse range on the A-scope
display of 150 m, assuming an acoustic velocity of 3000 m/s.
The driving pulse consisted of a single cycle of the frequency in use--l.3
to 0.13 ms in length. Because of ringing in the transmitter transducer,
the actual pulse length into the rock was several cycles long.
Signals from the receiver were displayed on an A-scope amplitude-versus-time
presentation common to radars, and were recorded photographically. The
photographs were thus interpretable on the spot. Time delay and range to
targets were scaled manually. In order to provide the capability of more
sophisticated data reduction, a two-channel tape recorder was connected
to the system (Figure 71). One channel recorded the data from the receiver
and the other channel recorded synchronization and timing pulses necessary
for later computer data reduction. These recordings could then be processed
in the laboratory for greater sensitivity than was possible on site. For
example, we could choose to integrate weak echoes over many pulse periods.
Early in our work we found it was essential to carefully mount the transducers
on the rock interface. The transducers were therefore held tightly against
the walls and ceilings with special pressure rigging. One rigging tool
consisted of a modified carpet installation device and another was a spring-loaded
device both utilizing several long poles (Figures 72 and 73). Both of these
devices were adjustable in order to span the room, either from wall to
wall or floor to ceiling, thus holding the transducers firmly in place
with a compressive force. The transducers were coupled tightly to floors
by their own weight and, if needed, one person sat on the transducer.
Figure 71
& 72 &
73
Several types of water-based thixotropic gels were used between the
rock and the transducers. Flexible plastic wrapping material was used to
cover decorated walls and ceilings before the gel was applied (Figure 74).
Using this method it was possible to avoid staining, marking, or otherwise
damaging chamber walls or ceilings. Mounting the transducer carefully to
assure good coupling was our most critical and time-consuming task. At
present we are searching for a rapid coupling technique to speed up the
field work.
Acoustic sounding in Egypt during our project was conducted at Luxor,
Giza, and Saqqara, and is described in the subsections that follow.
3. Measurements in the Valley of the Kings
The tombs of Tutankhamun and Ramses VI in the Valley of the Kings (across
the Nile from Luxor) were used to test the local limestone's acoustic properties.
Prior to coming to Egypt we were very uncertain about the attenuation of
sound in Egyptian limestones, the effects of faults and joints, and, most
important of all, whether known tombs or tunnels could be located by the
acoustic sounder.
During our experiments at Luxor we elected to take the acoustic system
into existing tombs (Figures 75 and 76) to attempt to detect neighboring
"unknown" tombs. Whether such detection could be achieved or not depended
mostly on the hitherto unknown acoustic properties of the rock. Operation
of our acoustic sounder from within known tombs and shafts in the area
is a distinct advantage because the valley floors are all heaped with tons
of natural and man-made rubble, much of which has already been shifted
several times by the tomb builders and subsequent excavators.
Many of the important tombs in and around the Valley of the Kings are
carved into the valley walls, often with a downward slope. They are tunnel-like,
as long as 100 m or more, with rooms carved along the sides and at the
ends of the tunnels. Some of the rooms have walls as long as 10 m on a
side, with self-supporting rock ceilings. An example is shown in Figure
77. The rock in the Valley of the Kings is layered limestone with occasional
interlayered chert. Bedding is horizontal, each plane a few centimeters
thick, with vertical faults that strike east to west or northeast to southwest.
Faults occur at approximately 30-m intervals. The limestone grades from
very poor, decomposed limestone, downward to competent, solid bedrock.
Figure 74
& 75 &
76
In our field work in the Valley we first measured the acoustic velocities
in the rock and found they were between 825 to 1275 m/s, depending on the
angle between the bedding planes and the sounder path. The velocity used
for the data analysis was 950 m/s, close to the average velocity.
A propagation path from the tomb of Tutankhamun to the entrance ramp
of the tomb of Ramses VI was chosen (Figure 78), to determine the ease
with which the acoustic sounder could have found Tutankhamun's tomb, had
Howard Carter been able to employ it in 1917. Probably, it would have saved
him six years of expensive and hard work.32 Within 30 minutes,
we had the data we sought; of course, we also knew approximately where
to look for the tomb!
A mapping survey of the tombs of Ramses VI and King Tutankhamun was
necessary to find their physical relationship with respect to each other.
From the resulting maps and diagrams, distances from which velocities could
be calculated were found, and operating locations for the sounder chosen
so that the observed sounder echoes could be easily interpreted.
The minimum distance between the ramp of the tomb of Ramses VI and the
ceiling of Tutankhamun's tomb is 6.3 m, according to our field survey (Figure
79). The first strong echo we saw on the A-scope had an arrival time of
about 12.5 ms after the beginning of the transmitted pulse (Figure 80).
Assuming a velocity of 950 m/s, the sonic path is 11.9 m. Since the acoustic
pulse travels a two-way trip distance to the target and back, the actual
range was half the total distance of 11.9 m, or 5.9 m. This value is in
good agreement with what we expected from physical measurements of the
tomb's location.
Figure 77
& 78 &
79 & 80
The echo signal continues to 38 ms, or 16 m. This is the approximate
range to the entry ramp of Tutankhamun's tomb (which measures approximately
14 m distant). The reflection geometry near the entry is very good for
such an echo and we believe we were receiving echoes from the entire length
of the ramp.
The second propagation path chosen was from Tutankhamun's annex chamber
to the entrance ramp of the tomb of Ramses VI, the reverse of the path
discussed above. The minimum range in this case is the same, or 6.3 m.
Two prominent echoes show up at 11.5 and 13 ms total two-way time delay
or 5.1 m and 6.2 m range, assuming a velocity of 950 m/s (Figure 81). The
shorter-range echo is probably due to some irregularity near the bottom
of the Ramses VI ramp paving stones. The 6.2-m range agrees closely with
the 5.9-m echo discussed in the previous paragraph.
Figure 81
Another, closer, echo occurs 4.25 m distant, 9 ms after the transmitted
pulse. This echo is too close to come from Ramses VI's tomb. It may be
related to a feature of the nearby rock fault we noticed during our survey
of the tomb (Figure 82).
Echoes observed at 32 and 35 ms (15 to 16.5 m away) are at the correct
ranges to be coming from the entry pit and from the ground surface directly
above (Figure 83).
Figure 82
& 83
The third sounding path chosen for our measurements was from the roof
of Tutankhamun's annex to the entrance ramp of the tomb of Ramses VI (Figure
84). The sounder position was offset several meters to the south of the
ramp leading to Ramses VI's tomb. In this case, there is no flat surface
in the upward direction perpendicular to the direction of acoustic pulse
propagation. Therefore, the occurrence of any echo received would depend
on scattering from rough irregularities along the target surfaces.
The distance from the annex roof at this position to the Ramses ramp
floor varies from 7.5 to 9.5 m, and from the side wall of the ramp the
range is even greater. The echo we observed at 7.8 m range lies within
the predicted range interval (Figure 85). The next echo, at 11.5 m range,
is probably from the ground surface, which we estimated to be 11.25 m away
(Figure 83).
The early echo at 3.8 m range is most likely from the fault previously
noted, which measured 4.25 m distant to the southeast.
The farthest echo was 18 m distant. That echo source cannot be identified
without further measurements, but may be due to either a known or an unknown
chamber in the vicinity. This anomaly should be investigated by further
acoustic sounding.
The last day we were at Luxor, the sounder was used to inspect the area
to the south and west through the side walls of Tutankhamun's annex. Three
of the resulting echoes were from known sources, but six echoes were of
unknown origin. Four of these anomalous echoes correlated with each other
in two pairs.
Looking to the west, we obtained two large, clear echoes from ranges
of 5.25 and 7.75 m (Figure 86). The 7.75-m echo correlates with an echo
seen in a southerly direction at a range of 8 m (Figure 87). These two
echoes indicate anomalies of unknown origin to the southwest (intersection
on Figure 82). The 5.5-m echo to the west is a solitary reflection and
cannot be better located without further measurements.
Figure 84
& 85 &
86 & 87
Two more anomalous echoes came from the west at ranges of 11.5 and 15.25
m. Again, the first echo is solitary, but the second echo correlates with
an echo from the south, also at a range of 15.25 m (Figure 86). Figure
82 shows the intersection points that are formed by drawing arcs with radii
equal to the measured ranges.
The last two echoes seen in the westward direction come from ranges
of 18.5 and 21 m and correspond to the range of a deep, known pit 18.5
m distant, and a fault (see Figure 88) 22 m distant.
Figure 88
Three echoes are evident to the south, two of which have already been
discussed. The third echo is intermediate in range, 10.5 m (Figure 86).
This echo corresponds closely to the range of the ground surface and the
retaining wall, a distance of approximately 11.25 m.
In summary, working from within the tombs of Tutankhamun and Ramses
VI, we saw:
(1) An echo from the Tutankhamun tomb seen from the Ramses VI tomb entrance
looking down.
(2) Echoes from the Ramses VI tomb seen from the annex and the antechamber
of the Tutankhamun tomb looking upward.
(3) Echoes from known objects to the south and west of the annex of
Tutankhamun's tomb, one over 20 m away.
(4) Echoes from unknown features to the south and west of Tutankhamun's
tomb annex.
Of the unidentified echoes, the west echo is sufficiently interesting
to warrant further study, because there is a possibility it could be coming
from an unknown void. The team will study other sounder emplacements that
could further delineate this anomaly. Borescope drilling may be advisable
after a few further sounder measurements in this area.
We had just enough time at Luxor to determine that the sonar system
works well in the bedrock of that area. This was our primary goal. Although
we may already have found a valuable anomaly in the Valley of the Kings,
we think there is a better possibility of finding lost tombs in the Valley
of the Queens, since the tombs of eight queens in the chronologies are
undiscovered and the Valley of the Queens has not been so thoroughly searched.
The West Valley of the Kings is another good prospect; only two tombs have
thus far been located there. A general map of this entire area is shown
in Figure 89.
4. Measurements at Giza
Following our work at Luxor the acoustic team devoted its efforts to
the Giza plateau. Because we were interested in assessing the capabilities
of the sounder in the Valley of the Kings environment, we chose to work
around the periphery of the second pyramid to verify results from the resistivity
survey, within the pyramid of Cheops to determine the scattering property
of the blocks, and in Belzoni's Chamber of Chephren's pyramid.
Figure 89
Belzoni's chamber is located in bedrock under Chephren's pyramid, so
the acoustic sounder could easily be operated from this chamber to attempt
to locate any unknown tunnels and chambers. The other two nearby pyramids,
those of Cheops and Mycerinus, have conspicuously more chambers; therefore
some have speculated that more chambers are yet to be found in or beneath
Chephren's pyramid. However, none have been detected in the main body of
the pyramid above Belzoni's chamber.
The known tomb chamber, Figure 90, is large, 5 m by 14 m by 7 m high,
and was cut into the surface of the bedrock, roofed over with massive stone
slabs, and then the pyramid was built over it. The chamber had been plundered
in ancient times and when Giovanni Belzoni rediscovered the passageways
and chambers in 1818, he found a hole dug downward in the floor some 10
m deep. Apparently robbers had discovered nothing by this digging and the
hole was filled in 1962 by Dr. Ali Hassan28 when he cleaned
and restored the chamber.
Before commencing a search for echoes, our team measured the acoustic
velocity over a 19.8-m path through unfractured rock nearly parallel to
the horizontal passage. The longitudinal acoustic velocity was found to
be 3000 m/s and the transverse (shear wave) velocity 2020 m/s, using the
one-way measurement technique (Figure 91). Two-way sounding over the same
path, using a fault in the bedrock for a reflector, gave the same velocity
to within 6%. Subsequent data were reduced using an average velocity of
3000 m/s for convenience.
Soundings vertically downward through the floor of Belzoni's chamber
were then made from 11 different stations on the floor of the tomb (Figure
92), and to our surprise many echoes were observed. The echoes tended to
cluster around three distinct ranges--namely, 9 m, 21 m, and 33 m (Figure
93). The echoes at 21 m range were the most well defined.
Figure 90
& 91
The 9-m echoes were sharpest when the sounder was placed on the floor
of the north side of the chamber. We suspect this set of echoes may be
due to the now-filled hole dug by the robbers.
The echoes appearing at 21 m were strong, and extended in range in three
examples, suggesting a large scattering surface. Only one sounder placement
did not indicate an echo at this range, and that position was located 8
m north along the tunnel leading out of Belzoni's chamber, well removed
from the chamber area.
The echoes at 33 m range were also extended in range at two stations.
Two other sounder positions produced echoes at that same range. The transmitter
pulse (including ringing) was about 8 m long, and the echo occupied 13
m of space; therefore the target must be about 5 m in range "depth". The
"depth" is caused by the target width, which would have to be at least
19 m to produce a 5-m "depth" at 33 m range. The geometry for this echo
is as sketched in Figure 94.
Figure 92
Additionally, two stations showed "second-reflection" from the 21-m
range, and one station showed second reflections from the 34-m range. A
second reflection is produced when the radar pulse energy reflects back
and forth two times, instead of once. That is, the mounted transducer emits
a pulse, and the pulse travels to a reflecting target and returns to the
mounting surface. The surface on which the transducer is mounted may then
reflect enough energy back toward the target to continue the process, forming
a second echo having twice the range of the first echo. Additional echoes
may be formed in the same way.
Figure 93
& 94
Cheops' pyramid, built by Chephren's father, has a bedrock chamber (the
so-called "subterranean pit") approximately 33 m below bedrock level, or
25 m below the pyramid base. The echoes from 21 to 34 m below Belzoni's
chamber, then, come from reasonable depths at which to look for a hidden
chamber if Chephren followed his father's example. According to our data,
the two echoes' source appear to be along arcs as sketched in Figure 95.
Confirmation of an actual new chamber beneath Belzoni's chamber should
be made by diamond drilling a small (3 cm) hole in the floor and using
a borescope camera to explore any voids penetrated by the drill. Damage
from such a small observation hole would be minimal and easily repaired.
Should the anomalies be geologic in origin (i.e., faults or cracks), no
excavation would be required to prove their nature.
Figure 95
Horizontal soundings with the acoustic sounder were made from Belzoni's
chamber through the north and south walls of the chamber. To the north,
one set of echoes was observed grouped at ranges near 22.5 m (the approximate
range of a prominent fault extending beneath the entire pyramid and emerging
outside at the northwest and southeast corners of the pyramid). Other echoes
were seen at 32, 43, and 63 m (Figure 96). The last two echoes are probably
second reflections from the fault. The echo at 32 m range remains to be
explained. A possible new chamber in that area cannot be discounted at
present, according to our data.
The echoes looking south from Belzoni's chamber occurred at ranges of
17.25, 28.5, 37.5, 48, and 67 m (Figure 97). We have no information about
faults or bedrock features in this direction; it is therefore desirable
to make several more soundings from other positions outside the pyramid
through the lowest courses to determine the meanings of these echoes. However,
we are still uncertain whether we could study these anomalies from outside
the pyramid, because of the need to propagate horizontally across some
of the lower-course blocks of the pyramids. Also, exploratory boreholes
should be drilled through the north and south walls of Belzoni's chamber.
Figure 96
& 97
The resistivity team had searched along the pavement to the west side
of Chephren's pyramid for indications of tunnels or chambers. Several anomalies
were found by the resistivity method, and the acoustic team therefore set
up the equipment over two of the anomalies to see if acoustic sounding
gave anomalies analogous to those obtained by resistivity.
The first anomaly detected by resistivity on the west side of Chephren's
pyramid was 38 m south of the northwest corner of the pyramid and about
16 m away from the pyramid's base (Figure 98). The surface was limestone
bedrock, with northwest-to-southeast vertical faults every 10 to 20 m and
numerous small solution cavities and cracks. We assumed the acoustic velocity
in this rock was about 3000 m/s, typical of similar limestone around the
pyramid. (We estimate that our distance measurements as reported are subject
to an error of about 10% because of variations in local acoustic velocity.)
Figure 98
Acoustic soundings were made at seven positions along a north-south
line at about 2-m intervals, beginning 34.5 m from the northwest corner
of the pyramid. Many echoes were observed over the anomalous area. (These
are summarized in Figure 99.) Echoes occurring at ranges greater than 9
m are in many cases believed to be multiple reflections. One shorter-range
echo at 8.6 m appears to have eight multiple reflections associated with
it. The appearance of so many multiple reflections indicates both a well-defined
scattering surface and low attenuation in the medium (Figure 100).
Figure 99
& 100
However, the soundings do not clearly identify any one spot as being
particularly interesting. Had we taken higher-frequency data over a larger
area we might have learned more about their source. These anomalies are
a mystery because no surface features in the bedrock betray their existence,
but it is possible they are of geologic origin.
The second resistivity anomaly investigated was also on the west side
of Chephren's pyramid and directly in the middle (105 m from the northwest
pyramid corner), about 23 m away from the pyramid base (Figure 101).
Five locations for sounder emplacement 3 to 5 m apart were chosen along
a curved, but generally north-south line. The velocity used in scaling
the data was again 3000 m/s. Interesting echoes at 11 and 37.5 m range
(Figure 102) were observed near sounder position 5 (Figure 101). The 37.5-m
echo was substantiated by an extended echo seen from other positions. The
extended echo suggests a target at least 40 m wide, or it may be a combination
of several smaller targets. The shallower 11-m echo was not seen at the
adjacent stations on either side, but a solitary 14.5-m echo was seen at
sounder position 2 on the end of the traverse. Figure 102 shows four arcs
drawn with radii equal to sounding echo ranges. These arcs intersect 7
m to the north of the array, about 11 m below the surface, making that
area very suspicious.
Figure 101
The west side of Chephren's pyramid has numerous faults that may be
the cause of some or all of these extraneous echoes. However, without borehole
observations and/or excavation we will never be certain about the source
of these anomalies.
Figure 102
The third and last resistivity anomaly that the acoustics team had time
to investigate was at a site centered 23 m west of the southeast corner
of Chephren's pyramid (Figures 22 and 103). Three east-west lines were
laid out at 6, 11, and 15 m south of the pyramid's base. Velocity measurements
determined only the transverse wave velocity (1750 m/s)--the longitudinal
velocity was assumed to be 3000 m/s.
Data were taken at 17 locations 2 to 5 m apart. Good high-frequency
(4000 Hz) data showed echoes in the 1.5-to-4-m range (averaging 3 m) at
all but one station (Figure 104). These echoes correspond to the thickness
of the very large foundation blocks that were set in place in this area
to build up the pyramid base from bedrock.33 Later, borescope
viewing confirmed the size of these foundation blocks (Figure 23).
A number of echoes from ranges of 4 to 30 m were probably from these
foundation blocks in both horizontal and vertical directions, but four,
possibly five, of the 17 sounder sites showed deep echoes near 50 m. Finally,
many of the locations showed strong echoes near a range of 14 m. The origin
of the echoes at 50 and 14 m range remains unknown. We cannot at present
rule out the possibility of a significant subsurface man-made structure
under the southeast corner, though the echoes could also be of geologic
origin. Core drilling with a drill longer than the one we had available
is desirable. The profusion of echoes we observed does not necessarily
imply a great number of voids, cracks or chambers are to be found in the
suspect areas. Some of the echoes may be multiple, and some from targets
deep in range or of complex shape.
5. Measurements in Cheops' Pyramid
It was not known if the acoustic sounder would detect meaningful echoes
in the block and mortar parts of the pyramids. The blocks are just the
right physical size to be reflectors themselves and we could imagine obtaining
thousands of echoes all indistinguishable from one another. on the other
hand, we believed that if the contact pressure between blocks (due to the
weight of the pyramid above) were sufficiently great, the acoustic sounder
might work in a vertical direction. The equipment was therefore set up
in the King's Chamber of Cheops' pyramid and two sets of data were taken.
The stone chamber itself is lined with large, polished Aswan-granite blocks
beneath which lie the main building stones of the pyramid.
Figure 103
& 104
One set of data was taken from the King's Chamber (Figure 105). The
soundings showed clutter for 40 ms, or about 60 m (Figure 106). This was
not an unexpected result; every block in every direction was reflecting
energy, and the first block was probably reverberating strongly from multiple
internal reflections (Figure 107).
Another set of data was taken in the tunnel leading out of the King's
Chamber. These data show a long string of multiple echoes originating from
a target 7.25 m from the surface (Figure 108). The distance to this echo
is half the distance to the "Queen's" chamber, or the approximate dividing
line between the original pyramid plan and the final pyramid plan. This
clear line of division in the blocks of the pyramid is evident on the west
face. The echo seems to indicate a cavity or void at that position. A sketch
showing the location of this anomaly is shown in Figure 109.
If an echo had originated from the Queen's Chamber, it would be indistinguishable
from the strong second reflection of the 7.25-m echo. At the time the sounding
was made, the value of these data was questioned because the echoes were
confused with the clutter. It is now obvious that the Queen's Chamber and
unknown chambers or voids in the pyramid might be detectable, even through
the block construction, from the grand gallery. If that is true, then the
acoustic sounder may have some use even in the block and mortar parts of
the pyramids. Thus more acoustic measurements within pyramids are in order.
Sounder frequencies can be carefully selected to minimize the reverberant
scattering from the individual blocks that tend to obscure echoes from
chambers. Possibly we could also elect to use a swept-frequency sounder
to help separate the unwanted reverberation within the individual blocks.
The sounder should also be operated in the subterranean pit and sloping
passages of Cheops' pyramid to look for other rooms and shed light on the
pyramid's internal construction. Our team would especially like to try
acoustic sounding within the Bent Pyramid of Snefuru at Dashur where it
has been historically recognized that undiscovered chambers probably exist.33
Figure 105
& 106 &
107 &
108
&
109
6. Measurements at Saqqara
The acoustic sounder was used two days in the sandy north Saqqara region
20 km south of Giza. The depth through the sand to bedrock was successfully
measured using the sounder, but a combination of low energy coupled from
the sand to the bedrock and high attenuation in the sand made it impossible
to detect reflectors in the bedrock.
The acoustic velocity in sand was set up at nine positions on a northwest-to-southeast
line 18.25 m long (Figure 110). The emplacements were 3 and 1.5 m apart,
and they more than spanned a known tunnel in the bedrock about 10 m deep
under a layer of sand.
Acoustic echoes were detected from a depth of 1.0 to 1.5 m at all positions,
except one. These echoes are believed to be due to the rubble-to-bedrock
interface. There were no further echoes coming from below what we believe
is the bedrock level (Figure 111), or from the tunnels below.
The sand exhibited a high value of acoustic attenuation, limiting the
useful range of the equipment to a few meters at best. Thus the acoustic
method appears unsuited for reliable tunnel detection in bedrock below
sand. However, the method has value in determining the thickness of sand
overburden and can detect irregularities (large artifacts, such as statues
of large blocks of stone, for example) buried in the sand. This latter
capability should be put to use during excavation of ruined temple areas
covered with sand or mud debris, a situation very common in Egypt. The
sounder could help to rapidly locate blocks of stone buried in the fill,
especially with a few modifications to the present equipment configuration.
Figure 112 is a photograph of the joint team from Ain Shams University
and SRI International (formerly Stanford Research Institute) who conducted
the work described in this report.
Figure 110
& 111 &
112
V. CONCLUSIONS AND RECOMMENDATIONS
While our previous work concluded that ground-penetrating radar could
never be of great usefulness in assisting the archaeologist in Egypt, our
latest field work shows that resistivity and acoustic sounding appear to
be very valuable adjuncts to archaeological exploration. Magnetometry also
has some value, and is an inexpensive and easy-to-use method. Comments
on aerial photography and thermal infrared imagery of Egyptian archaeological
sites sponsored by this project will be published as an addendum to this
report.
The purpose of our research is to simplify the task of the archaeologist--to
save him time, effort, and money. In Egypt, the archaeologist has vast
areas of land to consider and can greatly benefit by receiving information
in advance of digs. This information can suggest areas likely to be barren,
and suspect areas as well. Even the suspect areas can be tested prior to
excavation by borescope viewing, provided one can tolerate a small (3-cm)
hole through the strata. Ideally our project would like to present the
archaeologist with a map of an entire zone showing anomalies observed,
in two horizontal dimensions and vertically as well. Small, high-priority
areas can also be surveyed using our equipment.
In many ways our work this year has been a successful, wide-scale feasibility
demonstration. We would like to verify subsequently a number of the anomalies
discovered during the course of our field work. The team would also like
to work in close cooperation with archaeologists and excavators in the
future to assure that time and energy are invested in areas of greatest
interest to the archaeological community. We wish to establish the sources
of our observed anomalies by means of borescope hole drilling and, when
appropriate, special excavations. Only in this way can the scientific methods
developed in the course of this project become integrated into standard
archaeological procedures in Egypt and elsewhere.
Our research team is largely composed of engineers and physicists with
some geological and geophysical experience. Thus our interests and priorities
do not necessarily correspond with those of the archaeologist. Therefore,
we must rely heavily on the archaeologist for guidance and wisdom.
In summarizing the major findings of our 1977 field work, the team wishes
to reemphasize that our equipment locates "anomalies" beneath the surface
by one means or another, and that these anomalies can be of natural or
man-made origin. It is virtually impossible for any equipment we know of
to remotely sense the contents of an unopened chamber (except by drill
and borescope), nor can we always tell whether an anomaly is a tunnel or
a natural fissure. Each instrumentation method has its sensitivity limits
and drawbacks as well. We cannot conclusively prove that something interesting
does not lie beneath the ground in a given area. However, only a few weeks
of work this year in Egypt has yielded a wealth of data and a number of
anomalies that should not be ignored. We therefore strongly recommend that
the anomalies we have described be checked by further survey work, drilling,
and borescoping, followed by excavation.
Our recommendations concerning specific anomalies are listed in Table
1.
Table 2 lists recommendations for future survey work in areas likely
to reveal further anomalies.
The joint team welcomes, and solicits, suggestions for areas of future
work in Egypt of interest to the international community of Egyptologists.
Table 1
DETECTED ANOMALIES AND RECOMMENDED FOLLOW-UP WORK
|
Location
|
Specific Area
|
Detection Method Employed
|
Recommended Follow-Up Work
|
|
1. Thebes
|
Valley of Kings
Valley of Queens
West Valley |
Acoustic
sounder |
Map are by acoustic sounder.
One anomaly found in vicinity
of Tutahkhamun/Ramses VI tombs
could be an unknown tomb |
|
2. Giza
|
Sphinx (at least
four anomalies) |
Resistivity |
Resistivity and acoustic survey
followed by borescope and
excavations to check out four or
five anomalies, one of which
could be a shaft, another a
tunnel. |
|
3. Giza
|
Inside Chephren
pyramid passage |
Resistivity |
Borescope to prove out anomaly
not in main fault are beneath
this passage. |
|
4. Giza
|
North face patched
pavement (Chephren) |
Resistivity |
Remove stones set in pavement
and check for possible vertical
shaft (archaeologist). |
|
5. Giza
|
Southwest side,
Chephren |
Resistivity |
Remove stones set in pavement
and check for possible shaft
(archaeologist). |
|
6. Giza
|
Chephren west side |
Acoustics and
resistivity |
Further acoustic survey. Drill
and borescope deep anomaly
showing no surface expression.
May be faulted zone in bedrock. |
|
7. Giza
|
Chephren center of
west face (Ali
Hassan tomb) |
Resistivity
and acoustics |
Explore shafts previously opened
for additional rooms that appear
to exist on basis of our data. |
|
8. Giza
|
Chephren south side |
Resistivity
and acoustics |
Drill several holes to examine
huge foundation blocks and
possible voids beneath. |
|
9. Giza
|
Chephren east side
center |
Resistivity |
Drill and borescope pavement for
possible tunnel between pyramid
east face mortuary temple. |
|
10. Giza
|
Chephren interior |
Acoustics |
Borescope floor and north and
south walls of Belzoni Chamber
for what appears to be possible
chambers beneath the floor. |
|
11. Giza
|
Cheops interior |
Acoustics |
Further acoustics work and
resistivity survey in Grand
Gallery and other passages
followed by borescoping to prove
out apparent unknown chamber
between King's and Queen's
Chambers. |
|
12. Saqqara
|
Ancient Animal
Galleries north-
west of Emery's
digs |
Resistivity |
Investigate what appear to be
tunnels and mud brick walls in
are described by Lepsius not
now opened. |
Table 2
RECOMMENDED FURTHER SENSING SURVEYS
|
Location
|
Specific Area
|
Detection Method Recommended
|
|
1. Giza
|
South of Cheops'
pyramid |
Drill and borescope second unopened boat
pit. |
|
2. Giza
|
Third pyramid |
Clean pavement around four sides of
pyramid and mortuary tample and repeat
resistivity and acoustic surveys. |
|
3. Giza
|
Various areas |
Conduct acoustic and resistivity surveys
over areas of suspected unknown tombs or
chambers. |
|
4. Saqqara
|
Various areas |
Conduct resistivity surveys to assist
local Egyptologists in connection with
current digging. |
|
5. Alexandria
|
Harbor |
Survey harbor with sub-bottom profiler
and side-looking sonar, to map area of
interest for underwater archaeology. |
|
6. Alexandria
|
Beneath
main city |
Drill holes and borescope for tomb of
Alexander, Ptolemies, and site of
ancient library. |
|
7. Tanis
|
|
Obtain recent aerial photography and
conduct resistivity survey. |
|
8. Dashur
|
Bent pyramid |
Perform acoustic sounding to reveal
location of an entrance to additional
unknown chambers the existence of which
was believed probable by A. Fakhry. |
APPENDIX A
MEASUREMENTS IN EL DORADO LIMESTONE MINE
Development of an acoustic sounder suitable for archaeological use began
in March 1976 under SRI internal sponsorship. Equipment available off the
shelf in the laboratory was first assembled in packages for field use in
order to demonstrate the feasibility of such a sounder.
The resulting system was neither very portable nor compact. Moreover,
we had little a priori knowledge of the sonic power that would be required,
the proper choice of suitable frequencies, the type of pulse, and the parameters
of receivers and associated filters. We were well aware that our off-the-shelf
underwater sonar transducer left much to be desired for working in rock.
After laboratory trials using large concrete blocks, tests of the prototype
equipment were made in December 1976 at the El Dorado limestone mine near
Shingle Springs, California. An active level of the mine 290 m below the
surface (Figure A-1) was chosen for our work site by the mine superintendent,
Mr. Claude Huber. The miners installed electric cables to our work areas
and generously provided other assistance. The velocity of sound in the
dense, high-quality El Dorado limestone was first measured. Velocities
ranging from 2000 to 6000 m/s were known handbook values for sonic velocities
in various limestones. Furthermore, we knew that the velocity can vary
as much as 10% from a single measured value, depending on the angle between
the direction of the acoustic path and the direction of any bedding planes
in the rock. Thus, if the rock were found to be layered, we knew that several
measurements in different directions would be desirable. However, because
the El Dorado limestone was very homogeneous, only horizontal velocity
measurements were needed.
Our procedure was to locate two parallel tunnel faces in the mine workings
enclosing the rock volume to be measured. The distance between the faces
was chosen to be at least four wavelengths long at a typical operating
frequency. Furthermore, we chose the geometry so that the distance that
surface waves must travel from transmitter to receiver was maximized. Figure
A-2 shows one of the test setups. The direct distance between the transmitter
and receiver was 13 m (or 4.3 l at 1000 Hz).
Surface waves in this instance would have to travel almost twice that distance,
so they would not be confused with the direct signal propagating through
the rock.
Figure A-1
& A-2
The transducers were coupled to the surfaces with various experimental
coupling agents, such as plaster of paris or sonic gel, and held mechanically
in place with supports, spring-loaded devices, and props. Transducer mounting
was found to be a critical procedure because transducer ringing had to
be minimized by trial-and-error adjustments to assure clean echoes and
low clutter. Furthermore, the transducers had to be mounted on rock surfaces
that were solid and that included the endpoints of the desired acoustic
path. On several occasions a transducer was attached to what appeared to
be competent surface, but we subsequently discovered that the rock was
merely a large slab, slightly cracked away from the main body. In such
cases little sound transmission into the main body of the rock resulted.
Once the transmitter had been attached to the rock wall of the tunnel,
the receiver was used as a hand-held portable probe with headphones attached
so that a suitable mounting position (where the signal pulse was loud and
clear) could be selected.
After both transducers were securely in place, the time delay from the
start of the transmit pulse to the start of the receiver pulse was measured
with the aid of an oscilloscope. A surveyor then measured the length of
the actual physical path, and with this distance and with the delay time
known, the sonic velocity in the rock was calculated.
In the example shown in Figure A-3, two reflections can be seen, the
first one weaker than the second. The signal arriving first in time is
the longitudinal or compressional wave, which has the highest velocity.
This is the wave desired for sounding work. Although the amplitude of the
second signal, the transverse of shear wave, is much larger, this wave
experiences very little reflection back from an interface, and is generally
lost entirely across an interface, so it is not important for sounding
purposes. Surface (Rayleigh) waves typically arrive later and have a velocity
even less than that of the transverse waves. We found in our experiments
that care had to be taken to determine the arrival time of the weak longitudinal
wave. Sometimes the transverse wave arrival was the only wave that could
be distinguished, and in such cases the needed velocity was estimated by
assuming that the longitudinal-wave velocity was about 167% of the measured
transverse-wave velocity.
The compressional-wave velocity of sound in El Dorado limestone (along
the path from the transmitter to receiver position 1 in Figure A-2) was
calculated to be 4643 m/s, and the transverse (shear wave) velocity was
found to be 2097 m/s, or only 45% of VL), lower than expected.
The earliest arriving signals shown in Figure A-3 were 2.8 ms and 6.2 ms
(both over a 13-m path). Since the scaling accuracy of our oscilloscope
photographs is ± 0.1 ms, the calculated
velocity is plus or minus 172 m/s, and the velocity used was rounded off
to 4600 m/s.
Figure A-3
The longest-range sounding paths chosen are depicted in Figure A-4.
Much of the rock between the east and west tunnels of the mine is of a
different type than the rock where the one-way velocity measurements were
made, and the velocities in such cases were slower--about 3130 m/s. The
sounding data shown in Figure A-5 show reflection delay times of 19.5 ms
for the 30.5-m path, and 14.8 ms for the 23.2-m path. The appearance on
the scope of these good echoes was the first proof we had that the acoustic
sounder system could have useful range capability for applications in archaeology.
Figure A-4
& A-5
An attempt to measure attenuation was made using receiver positions
1 through 6 in Figure A-2. Calculations were made according to the standard
equation; however, our results (Figure A-6) showed that there was very
little absorptive attenuation in the rock, in fact, too little to be measured
over a 13-m path.*
The roughness of the data shown in Figure A-6 was found to be due almost
entirely to variations in the transducer coupling to the rock walls.
Figure A-6
To further evaluate our breadboarded acoustic sounder, some measurements
were made in a specially constructed sandbox to test and calibrate various
underground sensors (Figure A-7). Several targets were buried in this pit
when it was dug into the earth adjacent to our laboratory, before the dry
sand fill was added. The acoustic velocity through the sand in this pit
was measured to be 180 m/s, at a frequency of 1000 Hz.
Figure A-7
Photographs of 1000-Hz soundings are presented in Figures A-8 and A-9.
Figure A-8 is an oscilloscope taken on the edge of the sand pit, showing
no prominent echoes. When the transducers were moved to the center position,
a strong echo appeared with a delay of 23.0 ms, or a range of 2.1 m, as
shown in Figure A-9. The top step of the buried adobe brick staircase is
just at that range.
Figure A-8
This test demonstrated that structures buried in a meter or two of sand
could be detected by acoustic sounding. In some of our tests even the interface
between the sand and the clay soil at the bottom of the pit was detected.
The maximum useful range of the sounder in sand has not yet been determined,
but the sand pit tests demonstrated that the sounder could be useful in
archaeological cleaning operations, such as detecting large artifacts before
they are accidentally damaged by the digging operations.
A more portable battery-operated acoustic sounder was then designed
and assembled, based on the successful El Dorado limestone mine tests.
That sounder was the prototype sounder described in this report. It is
obvious that this acoustic sounder can be greatly improved with further
development work, increasing both the system's versatility of operation
and speed of setup and measurement time.
Figure A-9
APPENDIX B
EXAMPLES OF ACOUSTIC ECHO TYPES
This appendix is included to illustrate the effect of the scattering
geometry on various types of signals seen on the oscilloscope photographs
of an acoustic sounder. If the echoing target is small compared to the
acoustic wavelength, the echo is a close replica of the transmitter pulse
and has an onset time that corresponds to the distance from the transmitter
to the target [Figure B-1(a)]. A typical example of an echo from a small
target is shown in Figure B-2(a).
An extended surface, forming a wide target, usually has irregularities
along its surface that return portions of the transmitted signal to the
receiver. The resultant echo is extended in range as shown in Figures B-1(b)
and B-2(b). The resulting echo is longer than the transmitted pulse by
an amount depending on the tangent of the angle between the beam center
and the reflector. If the extended surface is a flat surface perpendicular
to the direction of the propagating acoustic wave, and if the surface is
smooth, with bumps or dents small compared to the wavelength, contributions
to the echo are primarily due to a small circular zone approximately one
Fresnel zone wide. In this case the entire plane behaves as if it had a
scattering cross section A » p/2Rl,
provided R » l. R is the distance to the
target and l, the wavelength (Figure B-3).
Finally, echoes from two nearby surfaces at slightly different ranges
[Figure B-1(c)] can either interfere with or reinforce each other in their
overlapping range [Figure B-2(c)]. In some cases an inflection point, caused
by a phase difference in the two reflections, is the only indication of
an echo from a second nearby target [Figures B-1(c) and B-2(d)].
Ringing can occur when a transducer is poorly coupled to a rock surface,
or as a result of inadequate transducer design for our purposes. The amplitude
of the echo envelope rises and falls more slowly than that of a well-coupled
echo and the data have a rounded appearance with long trailing tails on
the echoes [Figure B-2(e)]. Ringing increases the receiver dead time and
results in the transmitter pulse (and the echoes) lasting longer in time
than optimum.
Figure B-1
& B-2 &
B-3
REFERENCES
1. N. Barakat, L. Dolphin et al., "Electromagnetic Sounder Experiments
at the Pyramids of Giza," Final Report, NSF Grant No. GF-38767, Stanford
Research Institute, Menlo Park, California (May 1975).
2. T. R. Lyons, ed., "Remote Sensing Experiments in Cultural Resonance
Studies; Non-Destructive Methods of Archaeological Exploration Survey and
Analysis," Chaco Center, National Park Service, University of New Mexico
(1976).
3. R. S. Vickers and R. L. Bollen, "An Experiment in the Radio Echo
Sounding of Temperate Glaciers," Final Report, Contract 14-08-000114650
for U.S. Geological Survey, Denver, Stanford Research Institute, Menlo
Park, California (October 1974).
4. L. T. Dolphin, J. D. Tanzi, and W. B. Beatty, "Radar Probing of Victorio
Peak, New Mexico," accepted for publication in Geophysics, Journal of the
Society of Exploration Geophysicists (August 1977).
5. Zahi Iskander and Slawki Naktih, "Future Methods for Antiquities
Research and Discovery," Proc. Eighth Conference on Antiquities, Rabat,
1-9 February 1977, The Arab League Educational, Cultural and Scientific
Organization.
6. B. B. Brenden, V. I. Neeley, and G. F. Garlick, "Borehole Seismics
Multiply Drill Data," Engr. and Mining Journal (1972).
7. H. T. Davis, Alexandria, The Golden City, Chap. 2 (Principia Press,
Evanston, Illinois, 1957).
8. J. Marlowe, The Golden Age of Alexandria, (Gollancz Ltd., London,
1971).
9. P. Montet, Les Enigmes de Tanis (Paris, 1952).
10. J. N. Beckerath, Tanis und Theban (Gluchostadt, 1951).
11. P. Montet, The Necropole Royale de Tanis (Paris, 1947-1960).
12. J. Hawkes, ed., Atlas of Ancient Archaeology (McGraw-Hill Book Co.,
New York City, 1975).
13. F. Bedewi and L. Alvarez, Science (February 1970).
14. J. P. Lauer, Saqqara--The Royal Cemetery of Memphis (Charles Scribner's
Sons, New York City, 1976).
15. K. Mendelssohn, The Riddle of the Pyramids (Thames and Hudson, London,
1974).
16. W. B. Emery, "Saqqara Excavations of 1964-65," J. Egyptian Archaeology,
Vol. 51 (December 1965).
17. R. Lepsius, Denkmaler aus Aegypten und Aethiopien, 1842-1845 (Berlin,
1849).
18. E. P. Uphill, "The Bibliography of Walter B. Emery," J. Egyptian
Archaeology, Vol. 58, p. 296 (Egyptian Exploration Society, London, August
1972).
19. B. Porter and R.L.B. Moss, The Theban Necropolis, Part 2, "Royal
Tombs and Smaller Cemeteries" (Griffith Institute, Ashmolean Museum, Oxford
Press, England, 1964).
20. K. P. James, private communication (February 17, 1977).
21. E. K. Ralph, "Magnetic Survey at Malkata, 19 February-22 March 1973,"
University of Pennsylvania Museum Applied Science Center for Archaeology,
Philadelphia, Pennsylvania.
22. S. Breiner, "Applications Manual for Portable Magnetometers," GeoMetrics
Corporation, Sunnyvale, California (1973).
23. W. B. Emery, "Preliminary Report on the Excavations at North Saqqara,
1969-70," J. Egyptian Archaeology, Vol. 57 (August 1971).
24. G. F. Tagg, "Interpretation of Earth Resistivity Curves," Technical
Publication No. 755, American Institute of Mining Engineers, Salt Lake
City, Utah (1940).
25. R. G. Van Nostrand and K. L. Cook, "Interpretation of Resistivity
Data," USGS Professional Paper 499, U.S. Government Printing Office, Washington,
D.C. (1966).
26. H. E. Barnes, "Soil Investigations Employing a New Method of Layer-Value
Determination for Earth Resistivity Interpretation," Bull. Highway Research
Board, No. 65 (1952).
27. E. R. Bates, "Detection of Subsurface Cavities," U.S. Army Engineers
Waterways Experiment Station, Miscellaneous Papers 5-73-40 (June 1973).
28. A. Hassan, "Preliminary Report on the Work Carried Out in Chephren
Pyramid Area--Seasons 1965-66-67," Egyptian Organization of Antiquities,
Cairo.
29. S. Hassan, "Excavations at Giza," Government Press, Cairo (1949).
30. D. Linehan, "A Seismic Problem in St. Peter's Basilica, Vatican
City, Rome, Italy" in Geophysical Case Histories, Vol. II, p. 615 (Society
of Exploration Geophysicists, 1956).
31. B. Bevan and J. Kenyon, "Ground-Penetrating Radar for Historical
Archaeology," MASCA Newsletter, Vol. II, No. 2, University of Pennsylvania
Museum Applied Science Center for Archaeology, Philadelphia, Pennsylvania
(December 1975).
32. H. Carter, The Tomb of Tutankhamun, Vol. 3 (Cassell, London, 1923-33).
33. A. Fakhry, The Pyramids (The University of Chicago Press, Chicago,
Illinois, 1969).
spelling and punctuation checked 28July02 RPS
 lambert@ldolphin.org
lambert@ldolphin.org

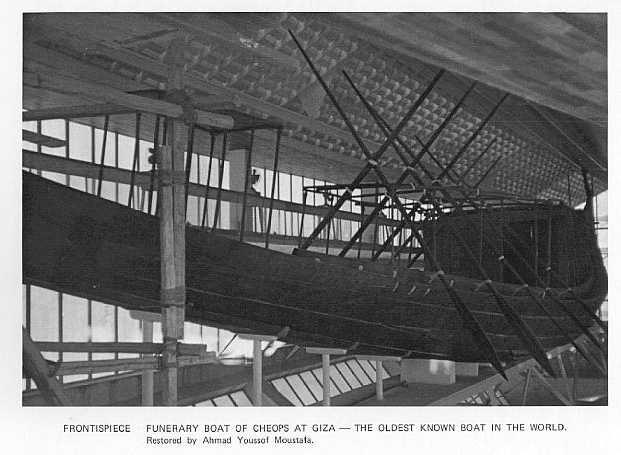{kind=link}
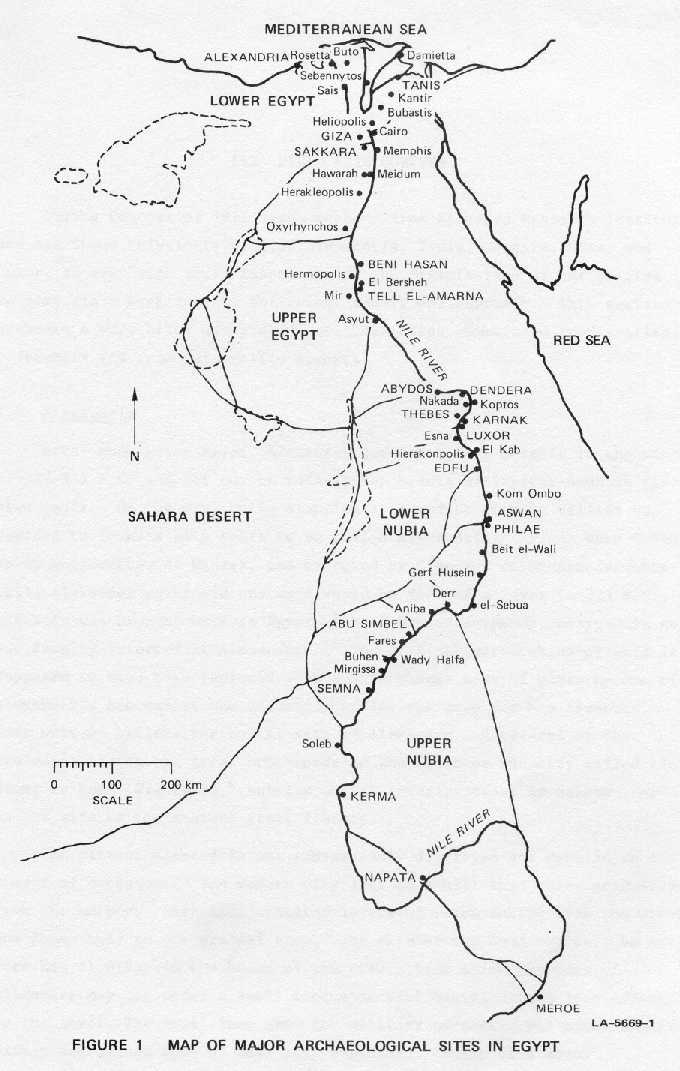{kind=link}
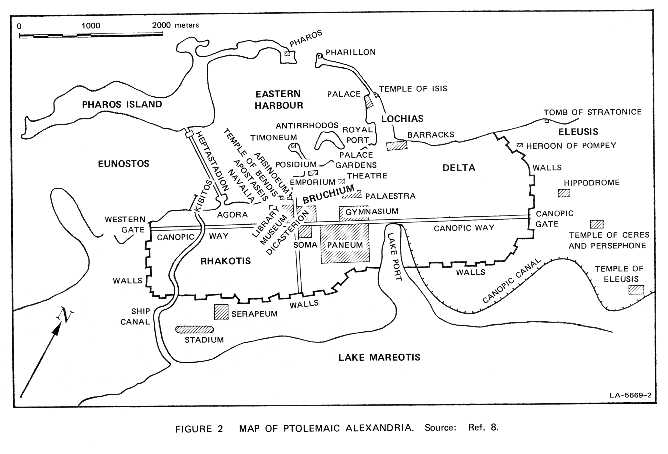{kind=link}
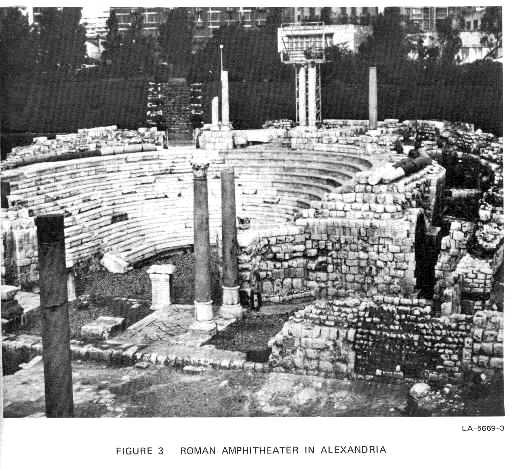{kind=link}
{kind=link}
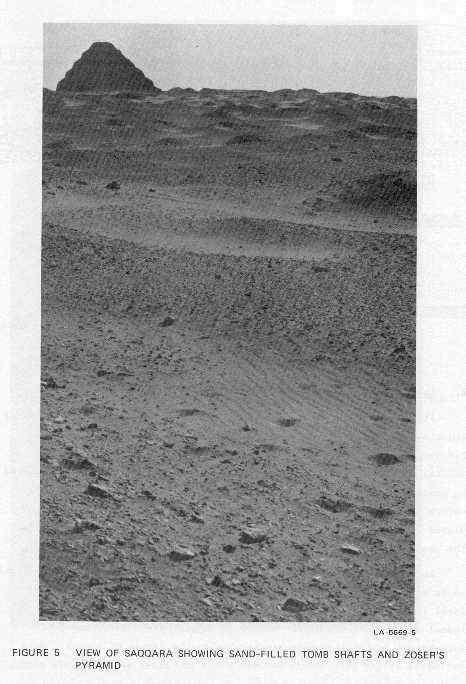{kind=link}
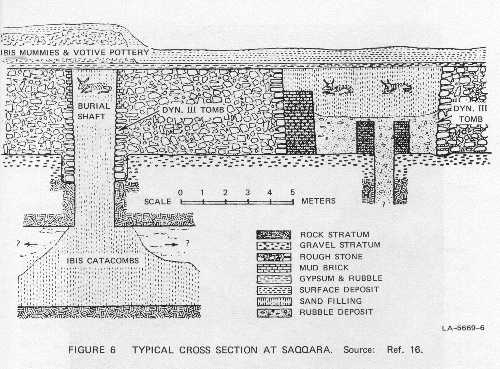{kind=link}
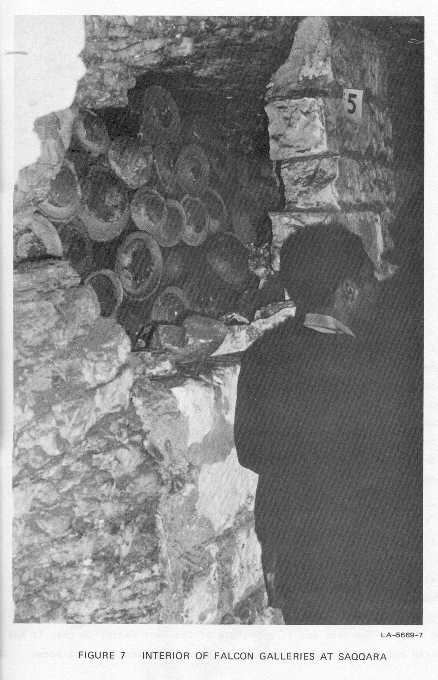{kind=link}
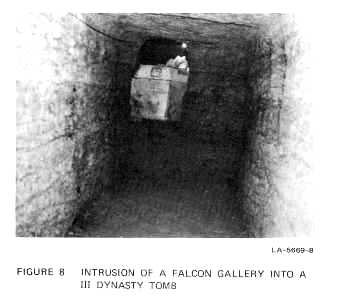{kind=link}
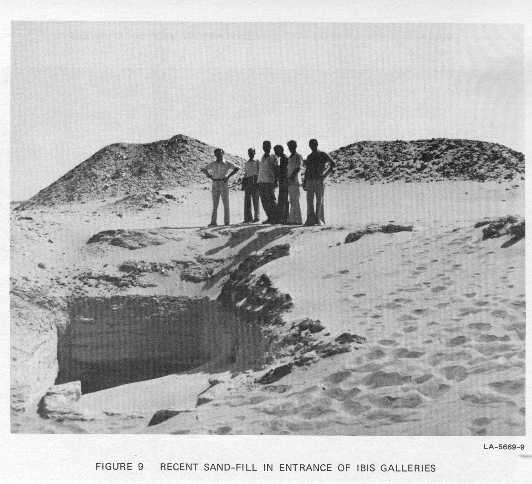{kind=link}
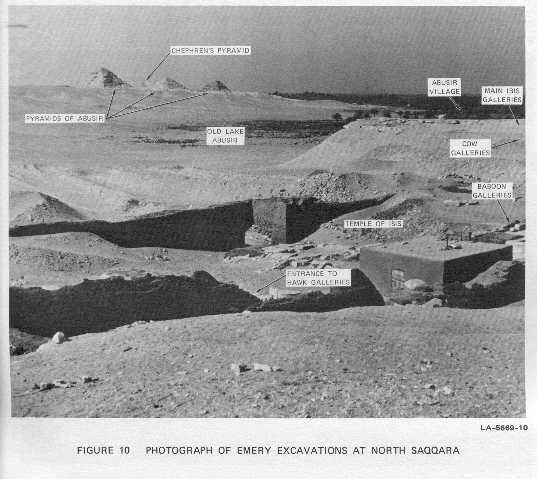{kind=link}
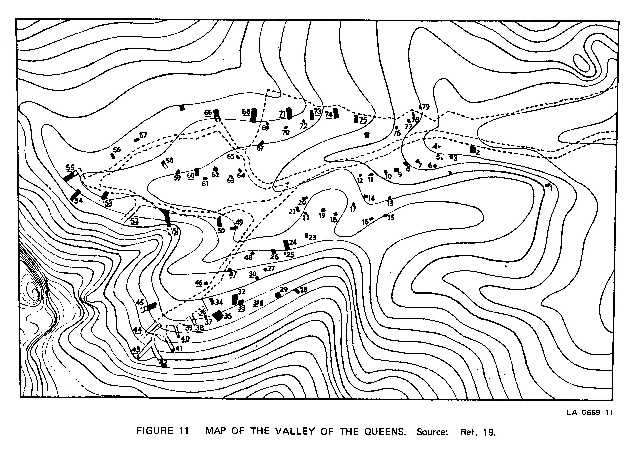{kind=link}
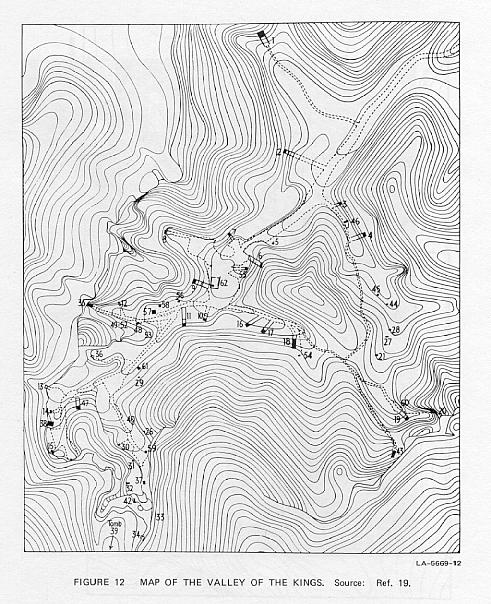{kind=link}
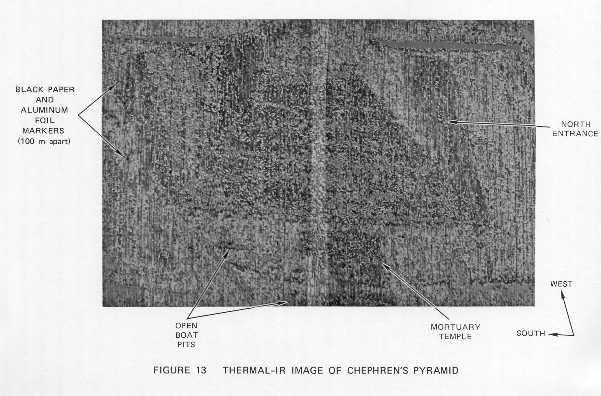{kind=link}
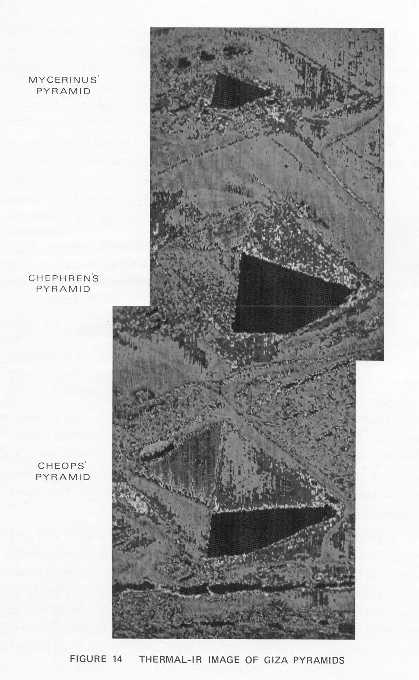{kind=link}
{kind=link}
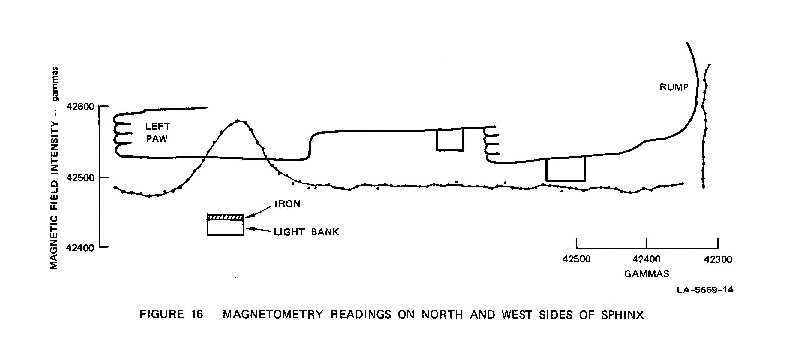{kind=link}
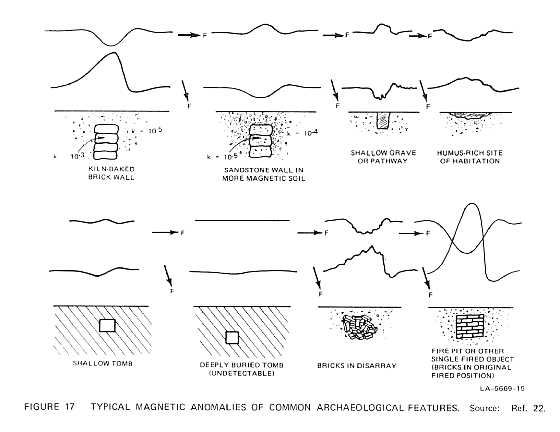{kind=link}
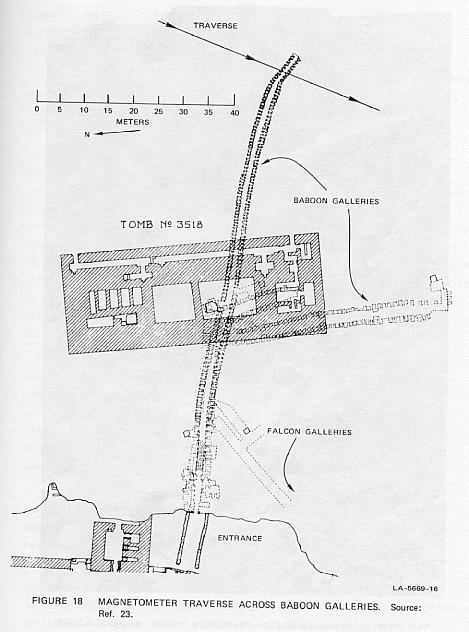{kind=link}
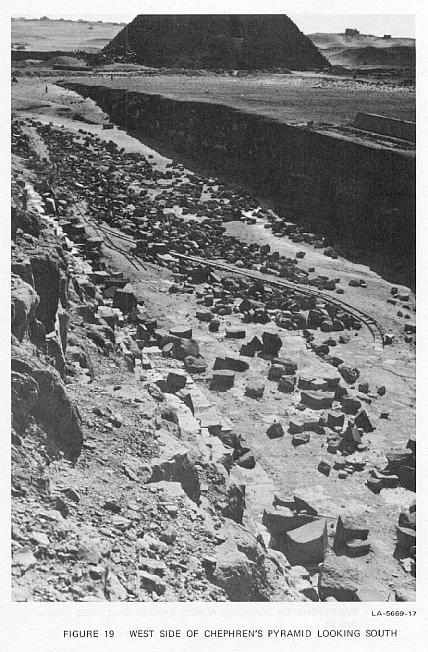{kind=link}
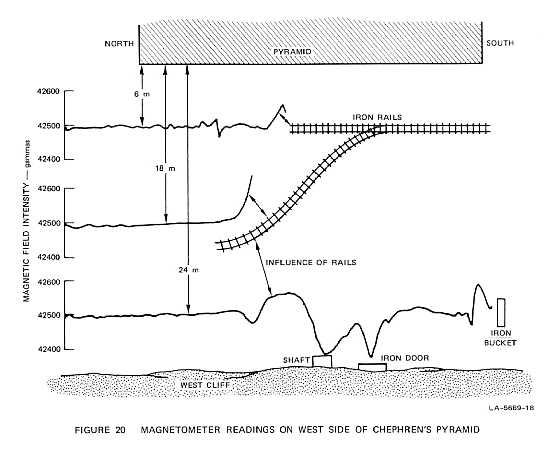{kind=link}
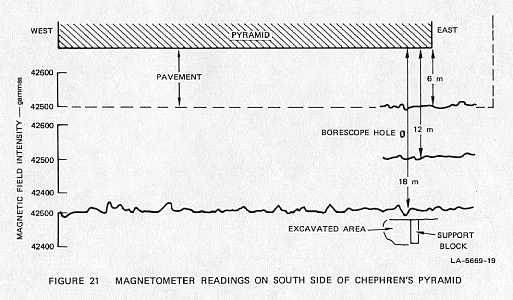{kind=link}
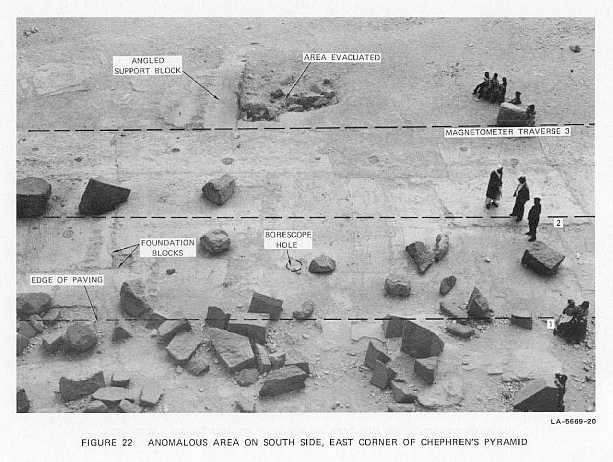{kind=link}
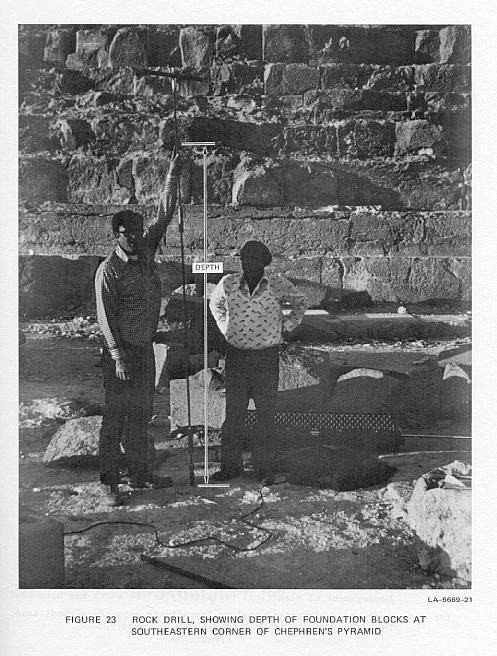{kind=link}
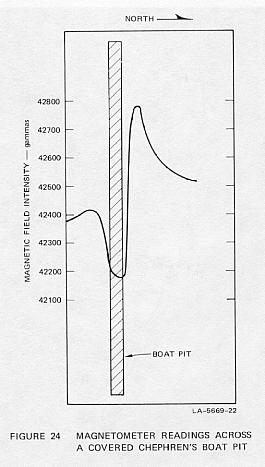{kind=link}
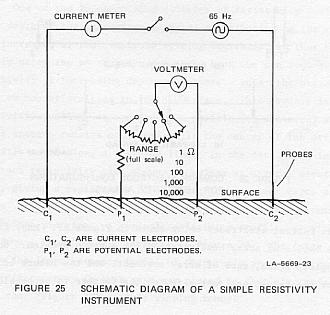{kind=link}
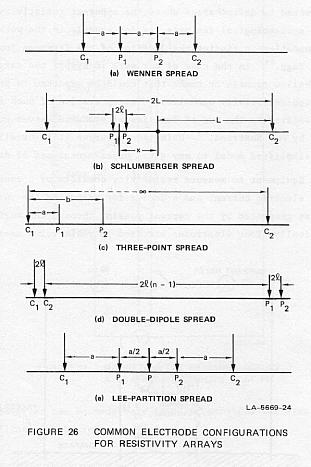{kind=link}
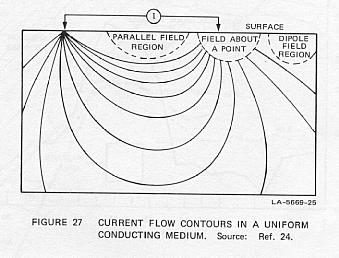{kind=link}
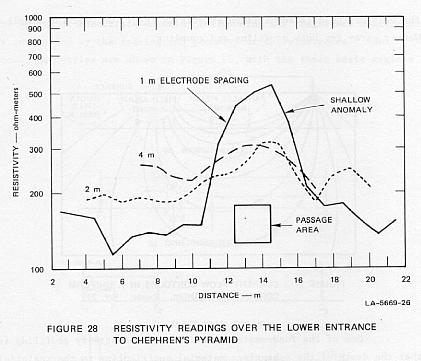{kind=link}
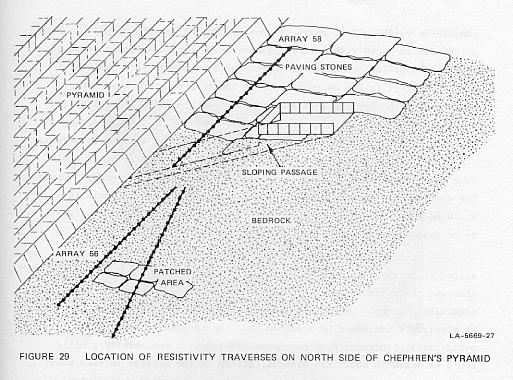{kind=link}
{kind=link}
{kind=link}
{kind=link}
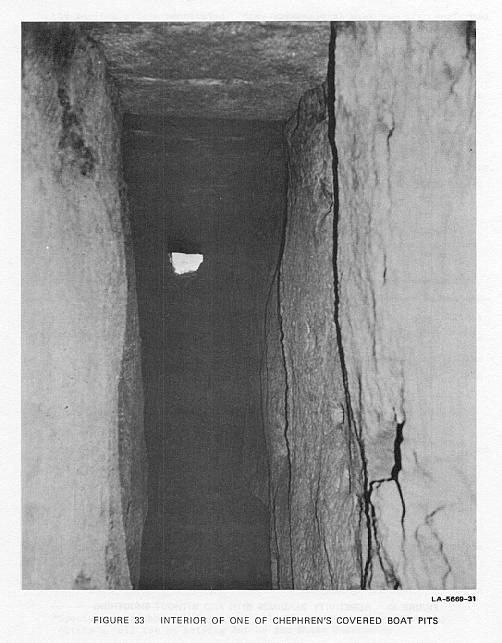{kind=link}
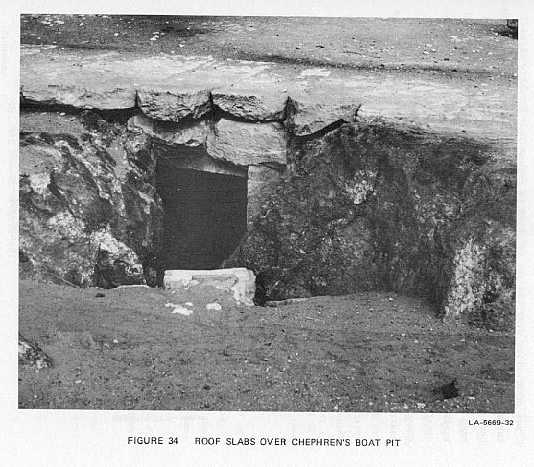{kind=link}
{kind=link}
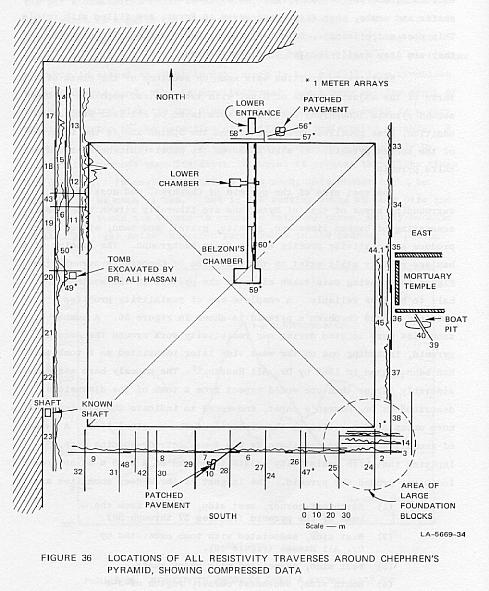{kind=link}
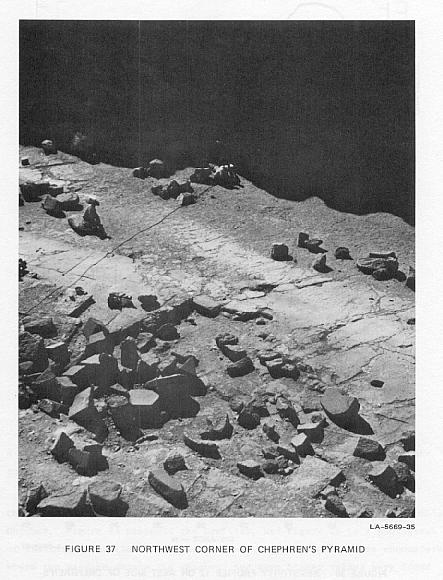{kind=link}
{kind=link}
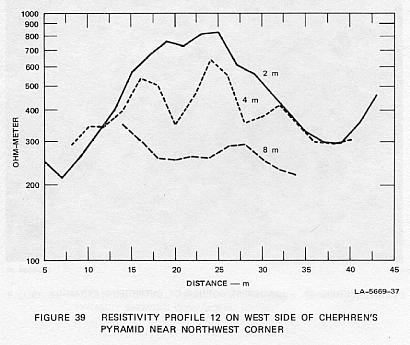{kind=link}
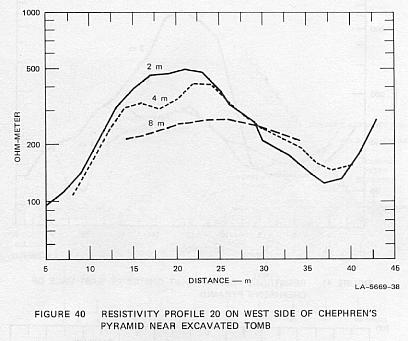{kind=link}
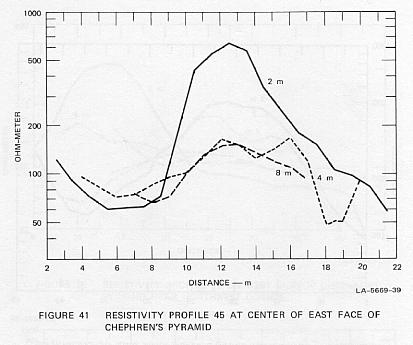{kind=link}
{kind=link}
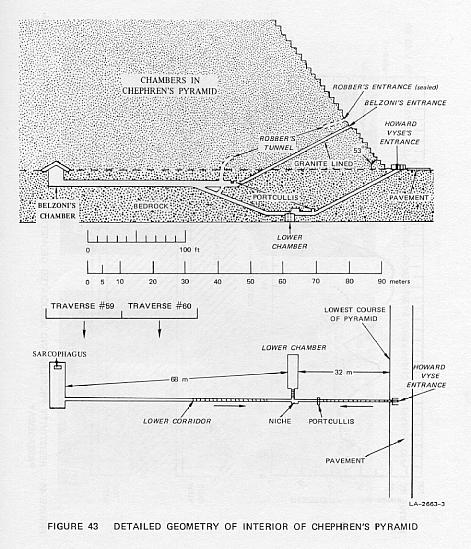{kind=link}
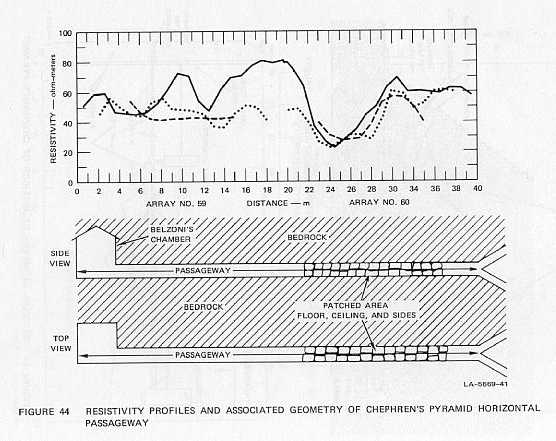{kind=link}
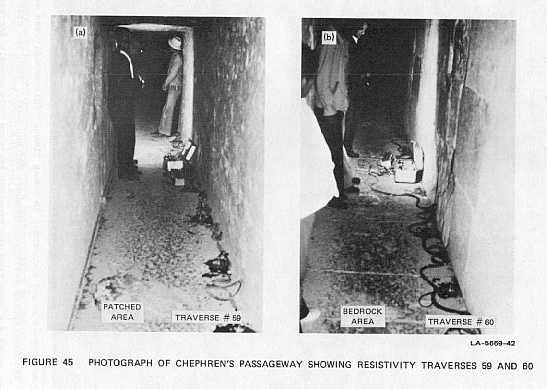{kind=link}
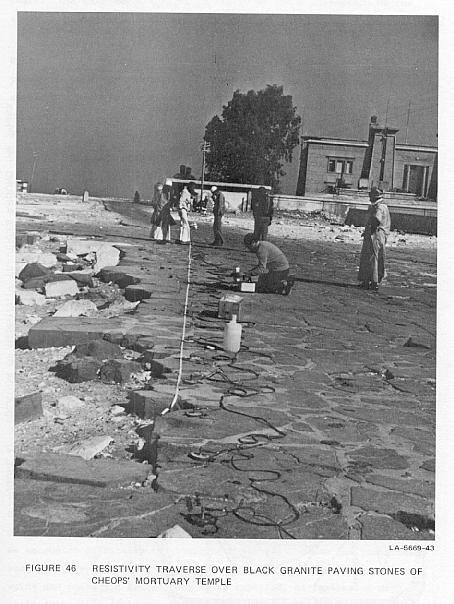{kind=link}
{kind=link}
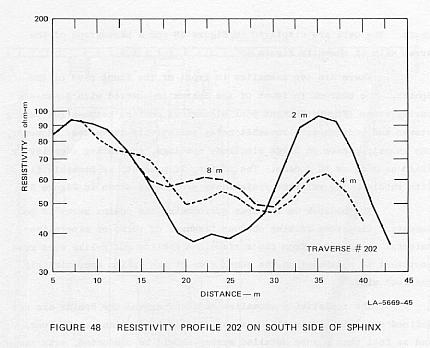{kind=link}
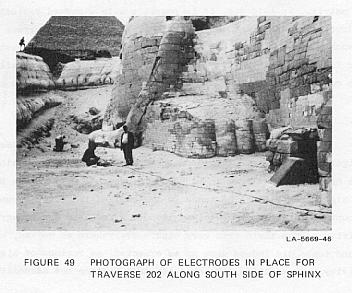{kind=link}
{kind=link}
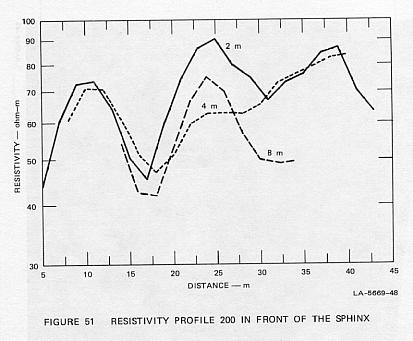{kind=link}
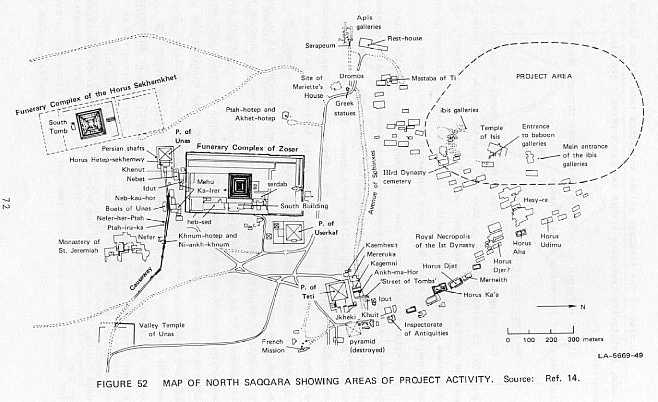{kind=link}
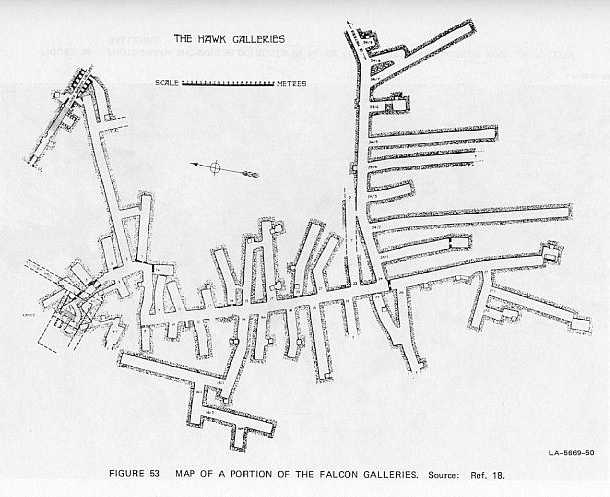{kind=link}
{kind=link}
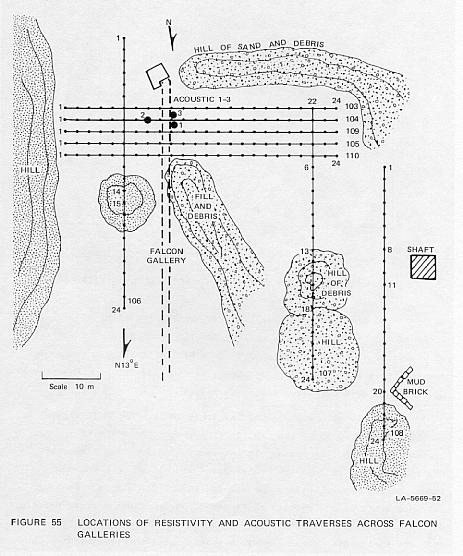{kind=link}
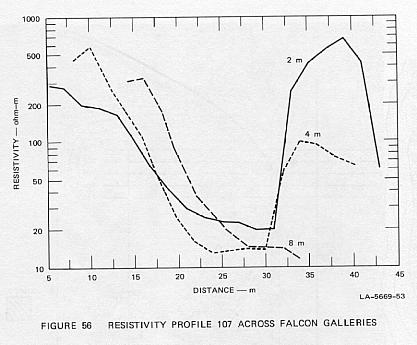{kind=link}
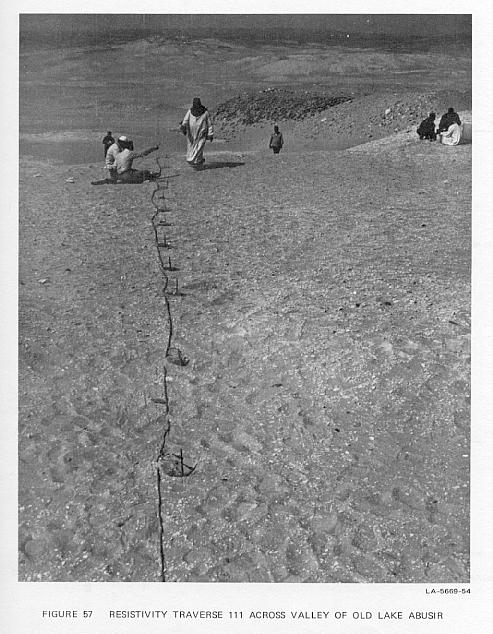{kind=link}
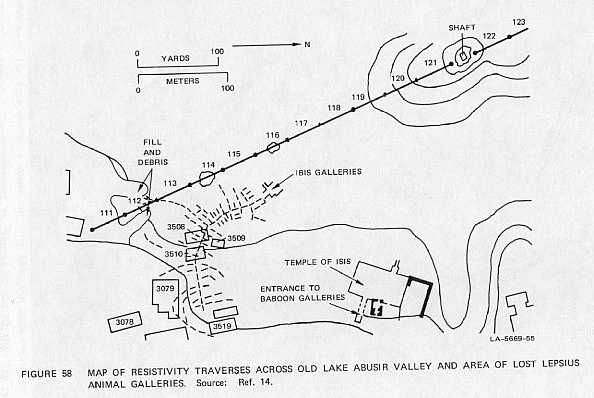{kind=link}
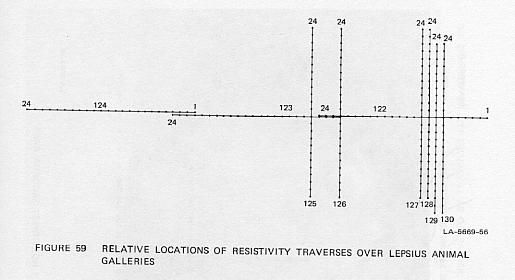{kind=link}
{kind=link}
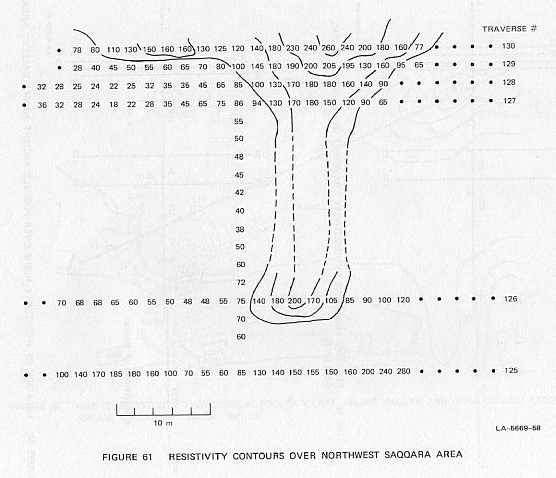{kind=link}
{kind=link}
{kind=link}
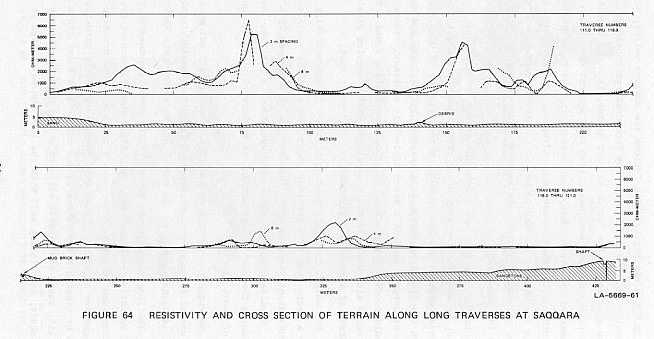{kind=link}
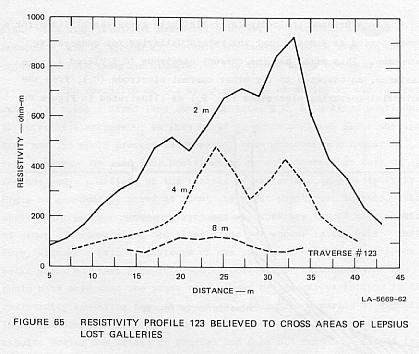{kind=link}
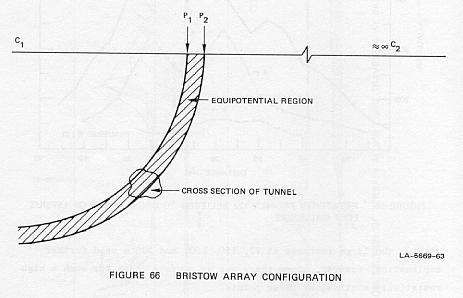{kind=link}
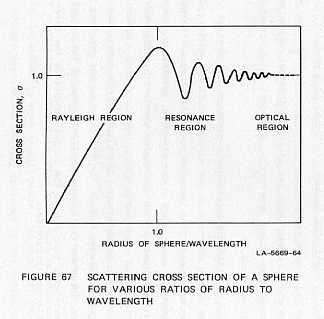{kind=link}
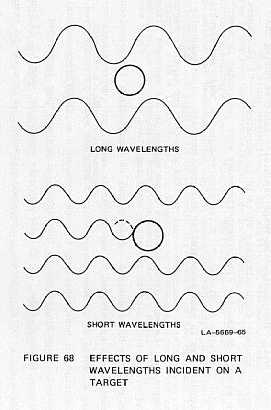{kind=link}
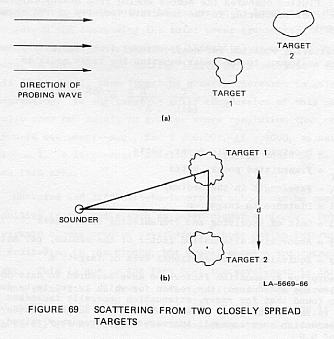{kind=link}
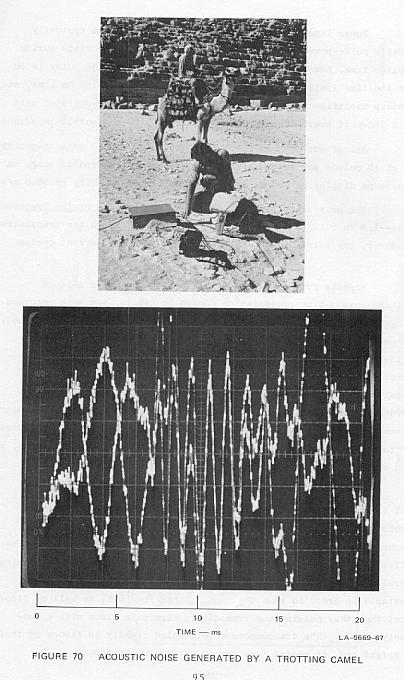{kind=link}
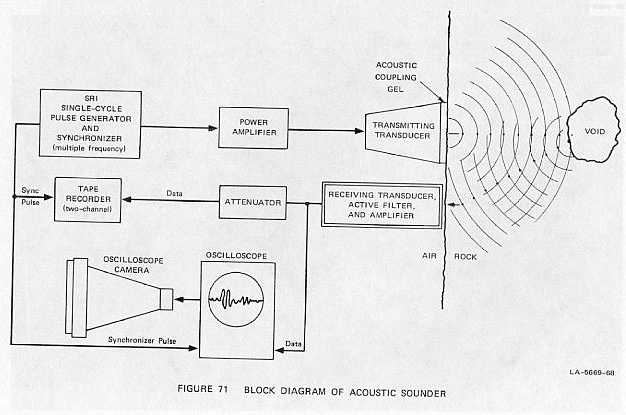{kind=link}
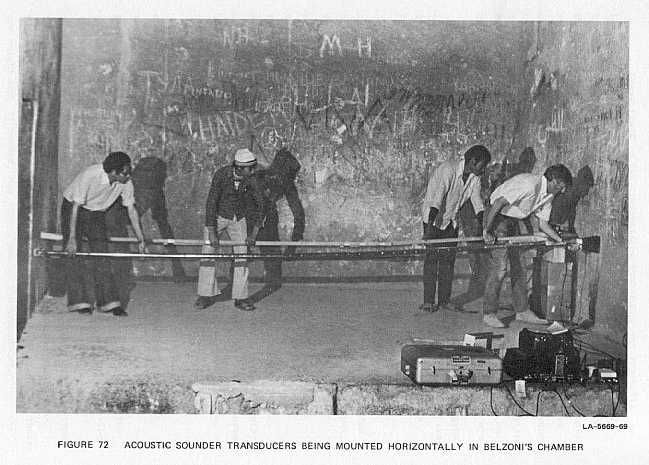{kind=link}
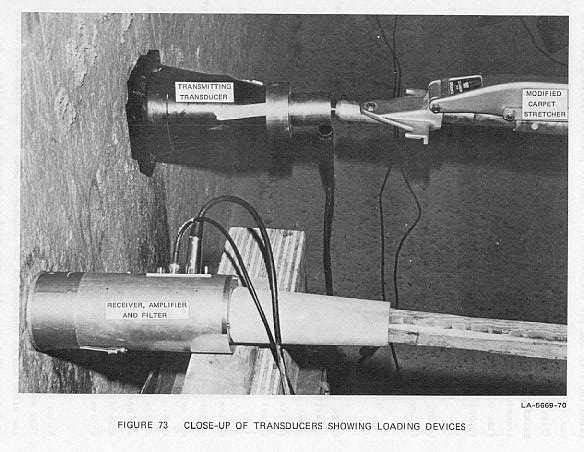{kind=link}
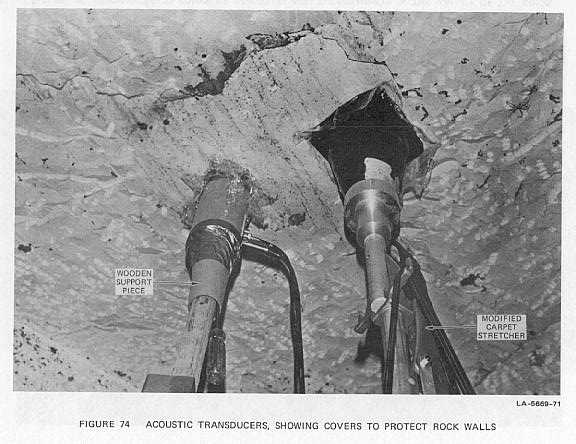{kind=link}
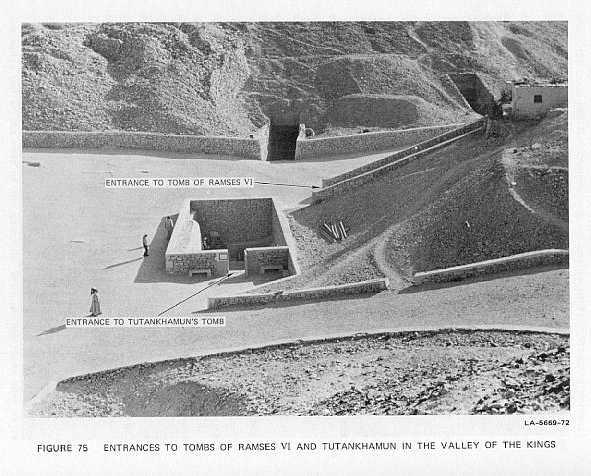{kind=link}
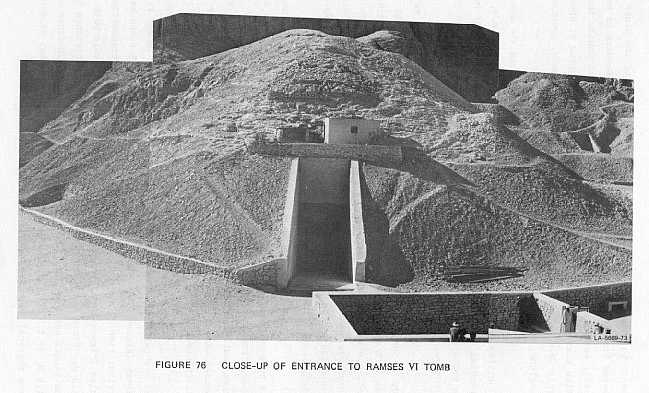{kind=link}
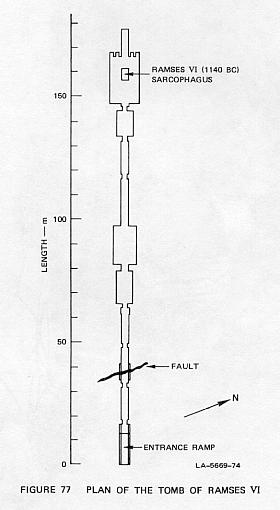{kind=link}
{kind=link}
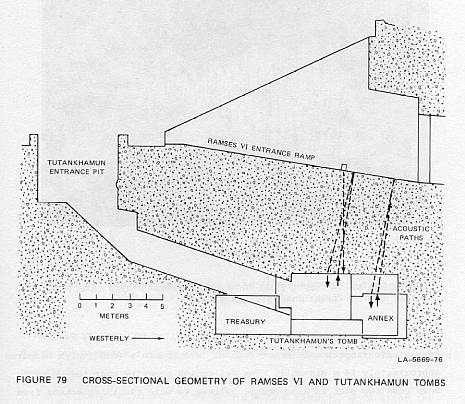{kind=link}
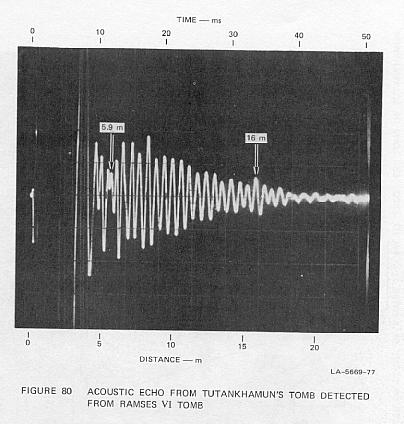{kind=link}
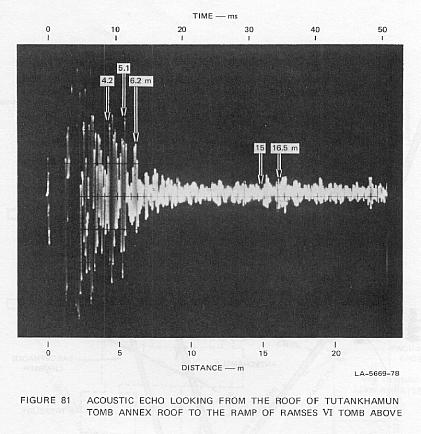{kind=link}
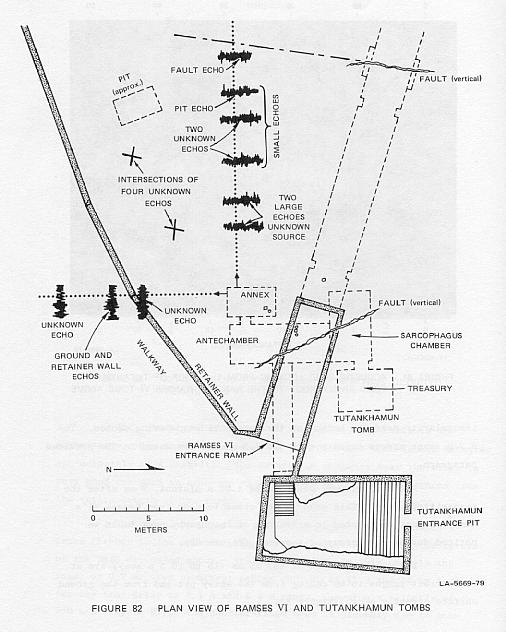{kind=link}
{kind=link}
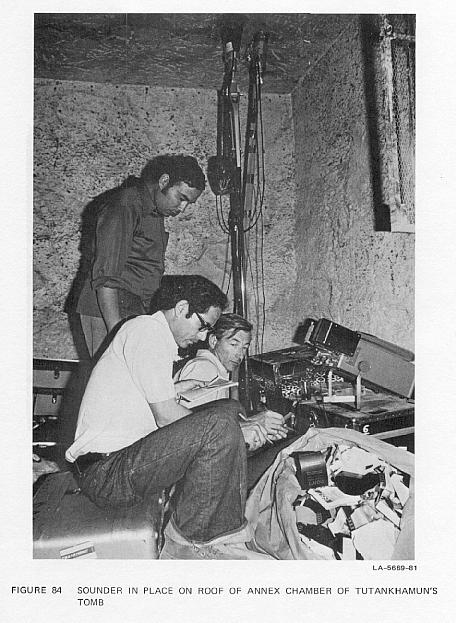{kind=link}
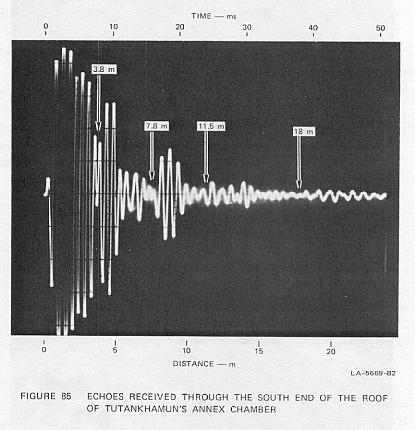{kind=link}
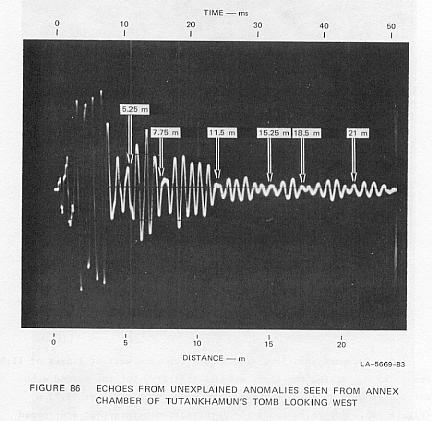{kind=link}
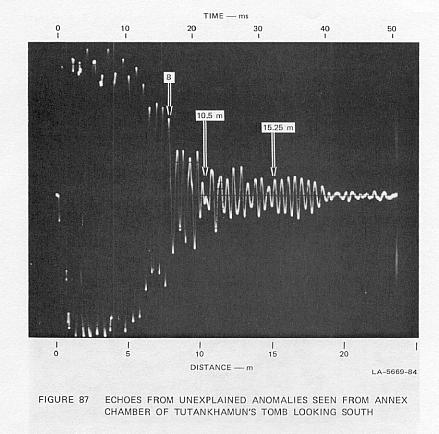{kind=link}
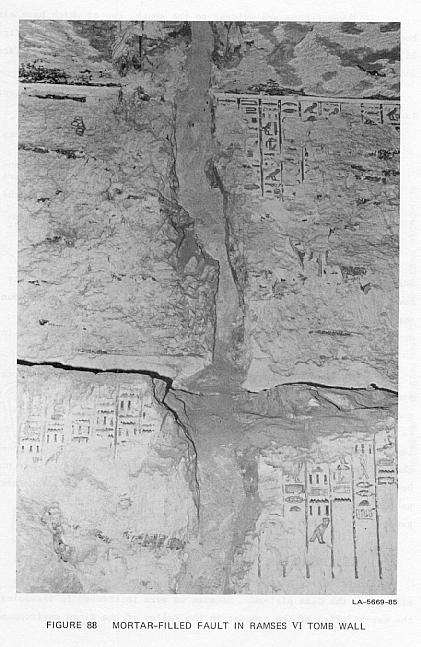{kind=link}
{kind=link}
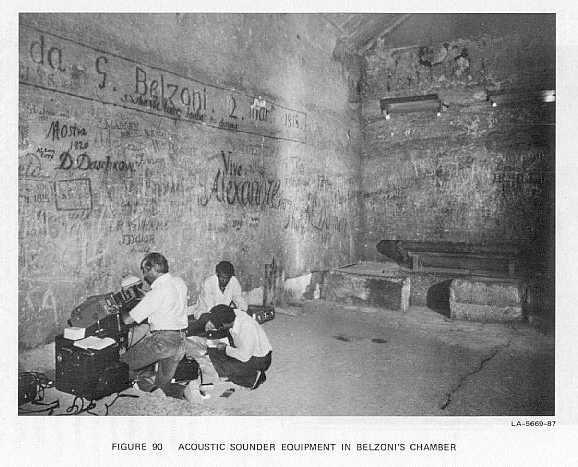{kind=link}
{kind=link}
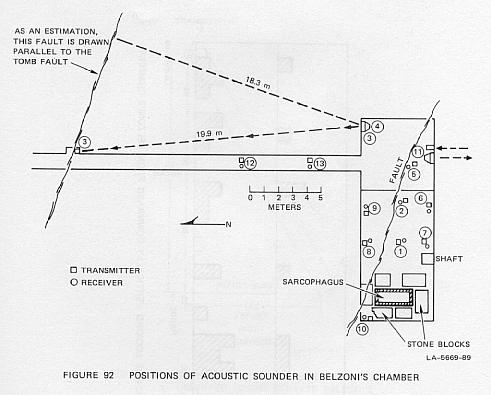{kind=link}
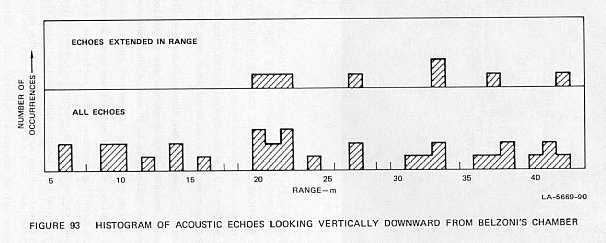{kind=link}
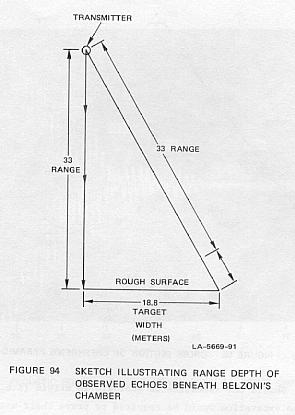{kind=link}
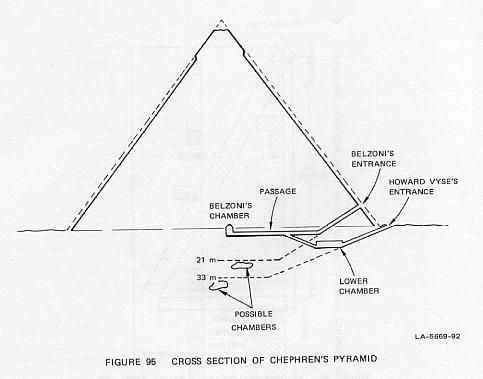{kind=link}
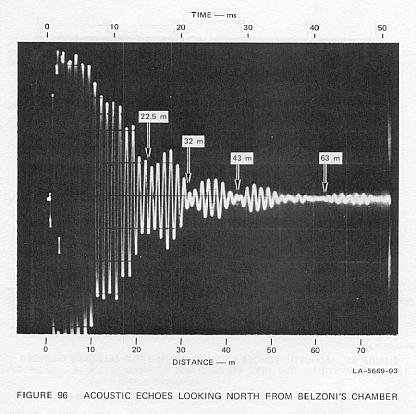{kind=link}
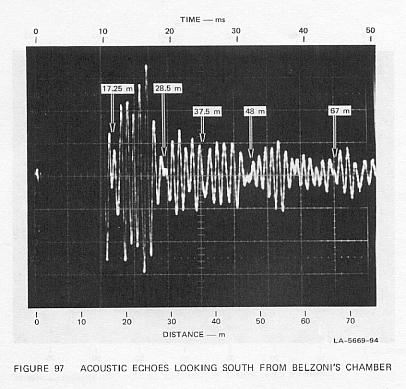{kind=link}
{kind=link}
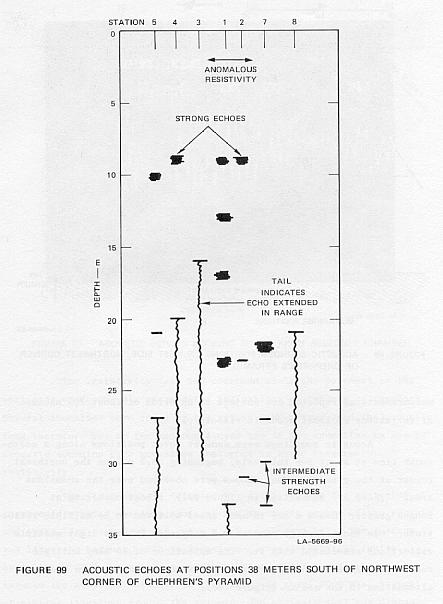{kind=link}
{kind=link}
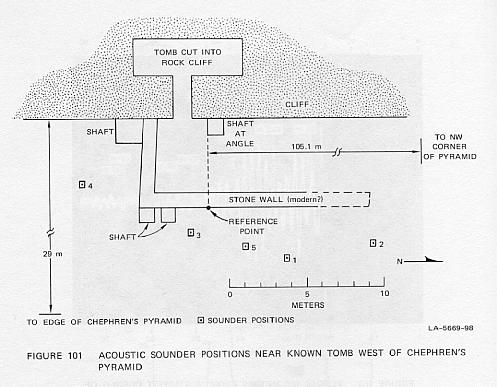{kind=link}
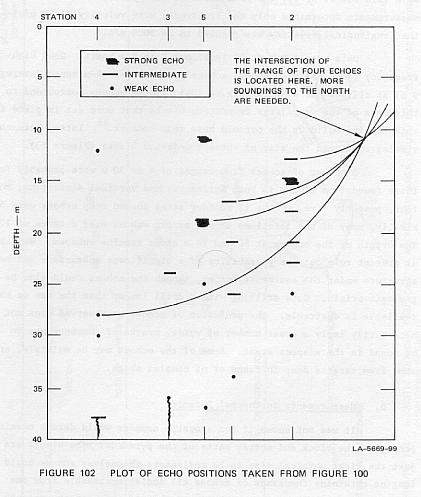{kind=link}
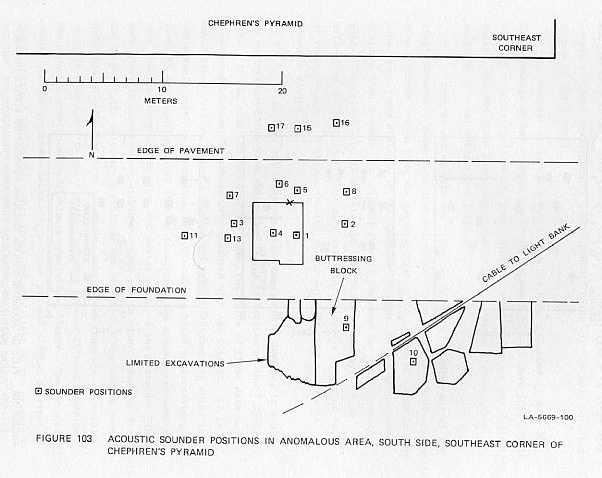{kind=link}
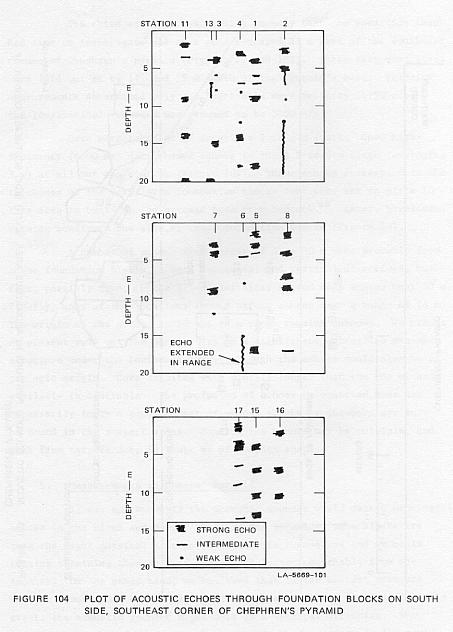{kind=link}
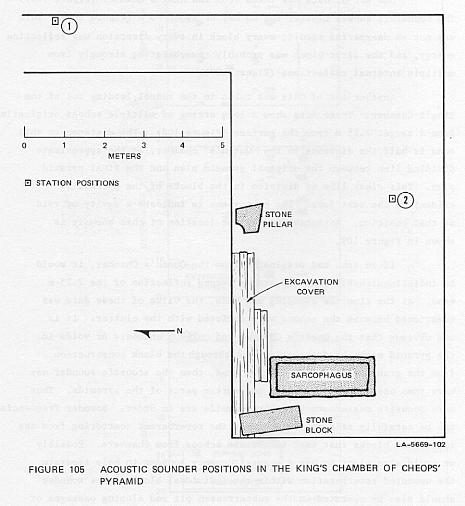{kind=link}
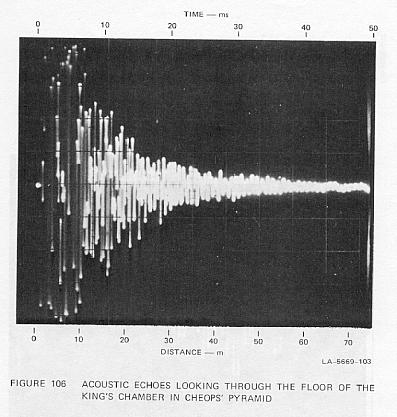{kind=link}
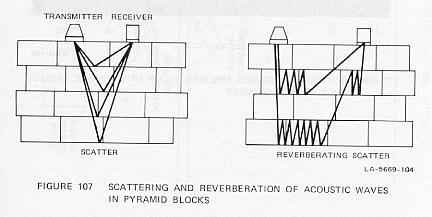{kind=link}
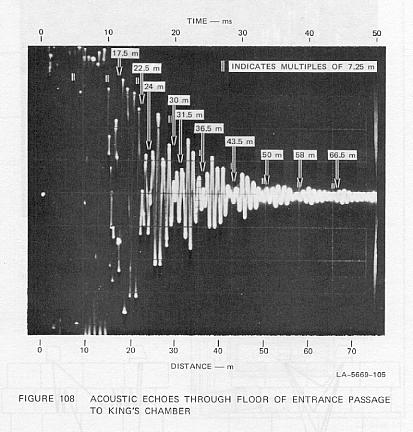{kind=link}
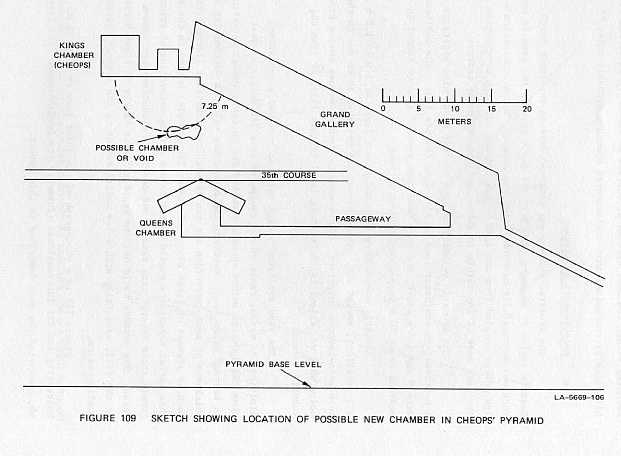{kind=link}
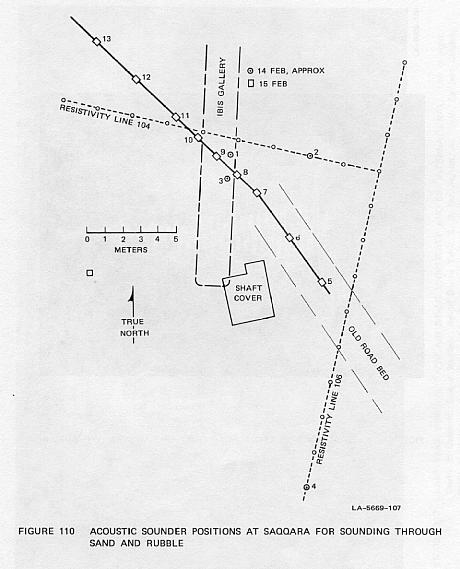{kind=link}
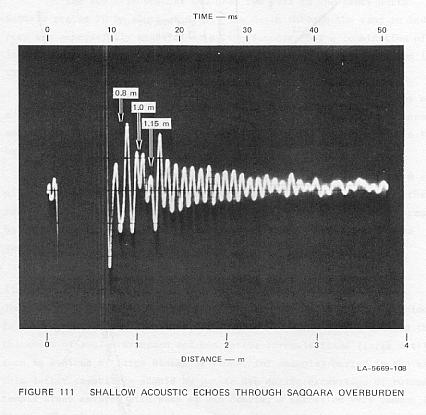{kind=link}
{kind=link}
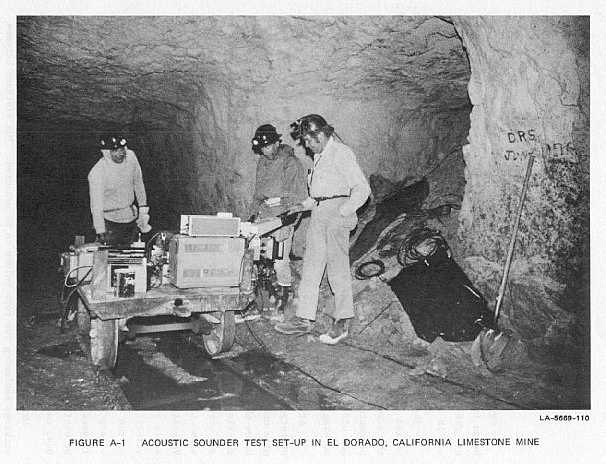{kind=link}
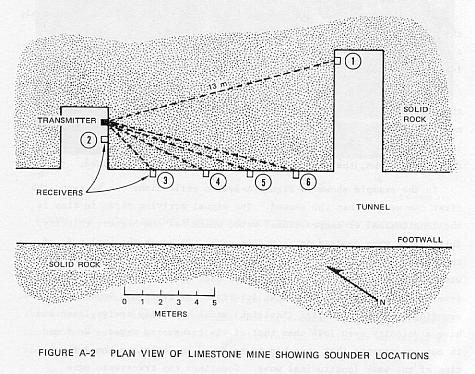{kind=link}
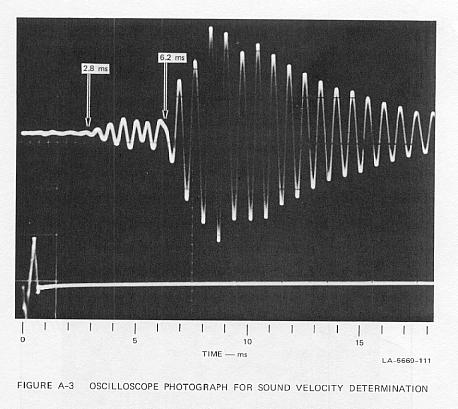{kind=link}
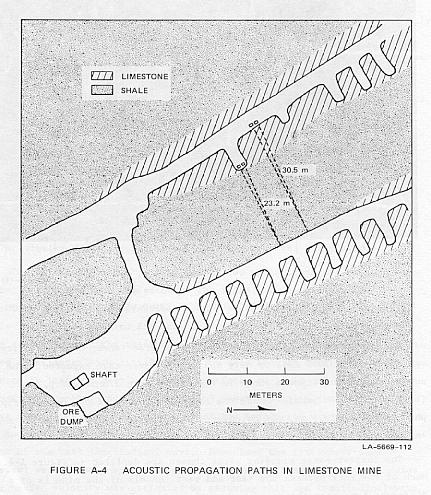{kind=link}
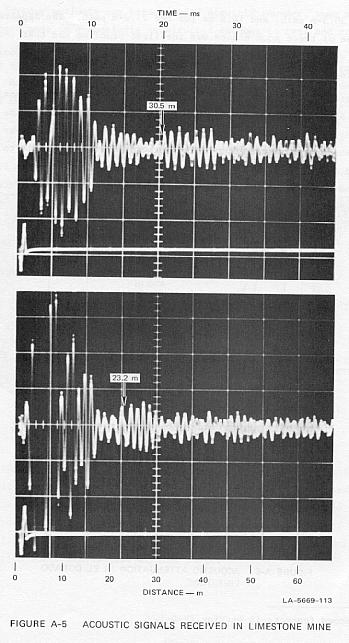{kind=link}
{kind=link}
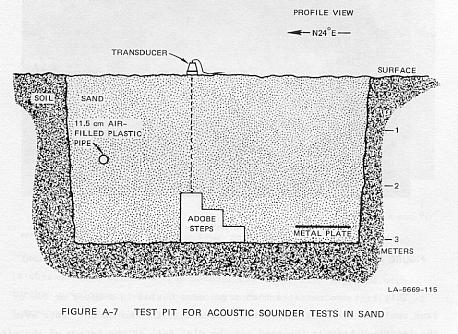{kind=link}
{kind=link}
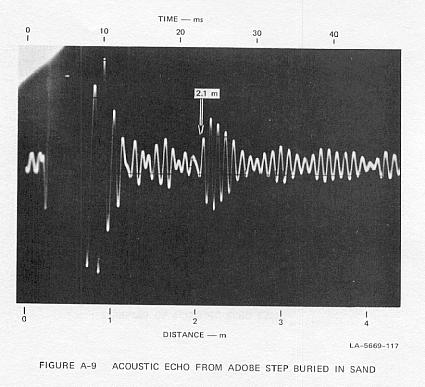{kind=link}
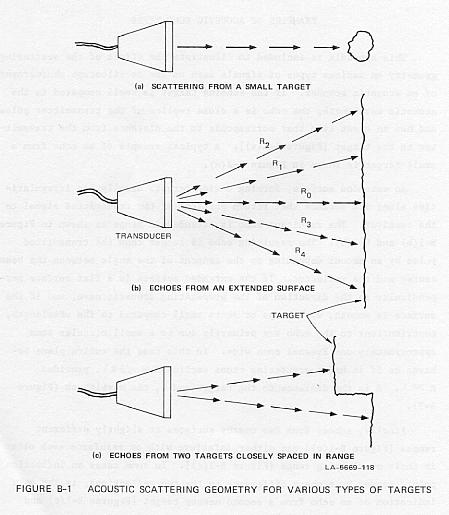{kind=link}
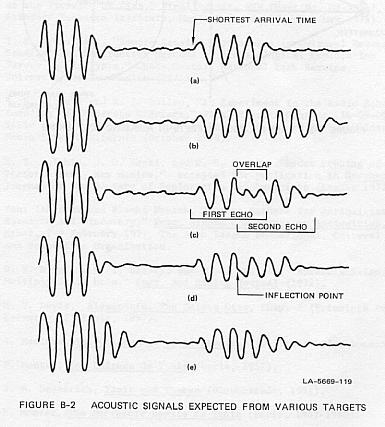{kind=link}
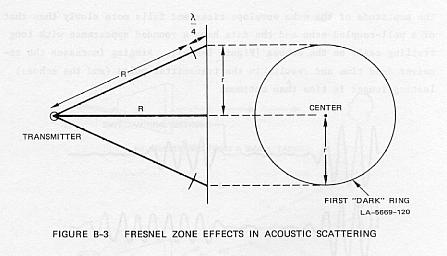{kind=link}